ヴイストン株式会社

本製品は生産・販売終了しました。後継機種「ビュートバランサー2」はこちらになります。
01低価格・無線操縦対応の2輪型倒立振子学習教材
 Beauto Balancer Duo(ビュート バランサー デュオ)は、倒立振子を題材に、入門から本格的な研究まで幅広く制御の仕組みや理論を学習できる倒立振子制御学習教材です。
Beauto Balancer Duo(ビュート バランサー デュオ)は、倒立振子を題材に、入門から本格的な研究まで幅広く制御の仕組みや理論を学習できる倒立振子制御学習教材です。
「BeautoBalancerDuo」は、大阪大学大学院基礎工学研究科の石黒浩教授の監修、大阪府立工業高等専門学校の金田忠裕准教授との共同開発による、教育の現場から生まれた教材です。2つのセンサ(ジャイロセンサとロータリーエンコーダ)の入力値を用いて車輪を制御するモータの出力値を調整することで、不安定な倒立振子を安定して立たせることができます。
02本製品の特徴
前後、旋回自在な移動が可能!
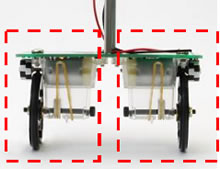 左右で独立した2つのモータを搭載することで、旋回などの動作が可能になり、倒立振子を利用したより発展的な学習が可能になり、楽しみ方の幅も広がりました。
左右で独立した2つのモータを搭載することで、旋回などの動作が可能になり、倒立振子を利用したより発展的な学習が可能になり、楽しみ方の幅も広がりました。
無線コントロール可能!
 ロボット専用無線コントローラ「 VS-C3 」を使用することで、前進後退・旋回などの操縦ができます。「 VS-C3 」の2本のアナログスティックを前後、左右に倒すことで前進後退・旋回の操縦を行います。また、後述のプログラミング環境でもコントローラの入力情報を取 得できます。
ロボット専用無線コントローラ「 VS-C3 」を使用することで、前進後退・旋回などの操縦ができます。「 VS-C3 」の2本のアナログスティックを前後、左右に倒すことで前進後退・旋回の操縦を行います。また、後述のプログラミング環境でもコントローラの入力情報を取 得できます。
※VS-C3を使用する場合、別途「ビュートバランサーDuo用 VS-C3接続基板VS-CN103」(800円(税抜))を半田付けする必要があります。
ライントレースに挑戦!
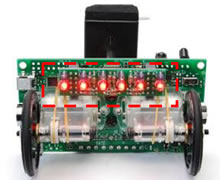 ライントレース用のセンサ基盤をオプション(4,000円(税抜))としてご用意。倒立状態でライントレースを行うことが可能。
ライントレース用のセンサ基盤をオプション(4,000円(税抜))としてご用意。倒立状態でライントレースを行うことが可能。
※ライントレース用センサ基板は取り付け時に、センサ基板、本体基板とも半田付けが必要になります。
C言語のサンプルプログラム、ゲイン調整用ソフトウェアも無償公開
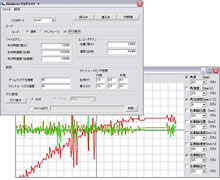 倒立振子制御部を含むサンプルプログラムを弊社Web サイトにて公開、無償で配布します。ルネサステクノロジ社の統合開発環境HEWなど、無償の環境での学習が可能です。また、PIDゲイン設定用ソフトウェアも無償で配布。ジャイロセンサの出力など、本体内部パラメータのグラフ表示、ログ出力も可能。PID ゲインの変更による挙動の変化を視覚的に学習できます。
倒立振子制御部を含むサンプルプログラムを弊社Web サイトにて公開、無償で配布します。ルネサステクノロジ社の統合開発環境HEWなど、無償の環境での学習が可能です。また、PIDゲイン設定用ソフトウェアも無償で配布。ジャイロセンサの出力など、本体内部パラメータのグラフ表示、ログ出力も可能。PID ゲインの変更による挙動の変化を視覚的に学習できます。
専用ソフトウェア及びサンプルプログラムは、ダウンロードページにて公開しております。
マイコンにはBeauto BalancerとおなじH8/36064Gを搭載。その他の構成要素もBeauto Balancerとほぼ同様で、同じ開発環境で引き続き学習が可能です。
エンコーダを高性能化
 Beauto Balancer のロータリーエンコーダより3.5倍の精度にすることでより安定した動作を実現
Beauto Balancer のロータリーエンコーダより3.5倍の精度にすることでより安定した動作を実現
03Beauto Balancerとの比較
本製品と弊社従来品のBeauto Balancerは、下記のようなコンセプトの違いがあります。
Beauto Balancer
- Beauto Chacerにも搭載されているCPUボード「VS-WRC003」を使用し、高い拡張性を実現
- シンプルでわかりやすい構成を採用
- C言語のサンプルプログラムを無償配布、書籍による解説
- 現代制御理論に基づいた学習資料の公開など教育機関のニーズにお応えするサポート体制
Beauto Balancer Duo
- 左右のタイヤに独立したモータを搭載
- 無線コントローラが接続可能。旋回が可能で自由に操作することが出来ます。
- ライントレース用センサが搭載可能
- 組み立て、動作確認済みで出荷
04報道実績
- 2010.02.16 週刊アスキー 2010 2/16号 ロボット特集記事
