���C�X�g���������
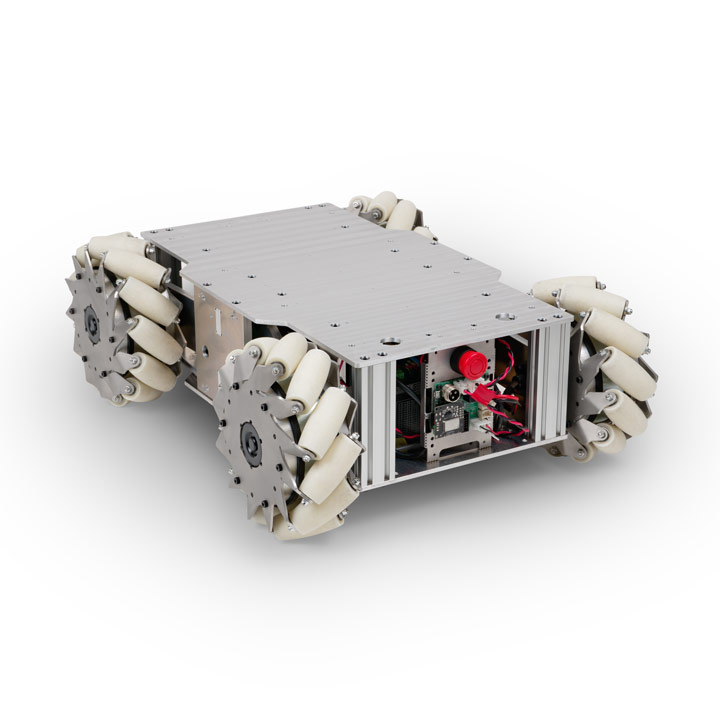
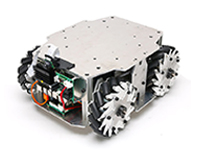
�����J���p��ԃ��{�b�g�V���[�Y
��Ԍ^���{�b�g���x�[�X�Ƃ��������ɂ����p���������܂��B
�ŐV���i




�����i
 |
 |
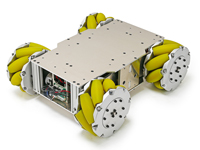 |
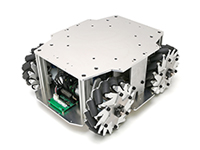
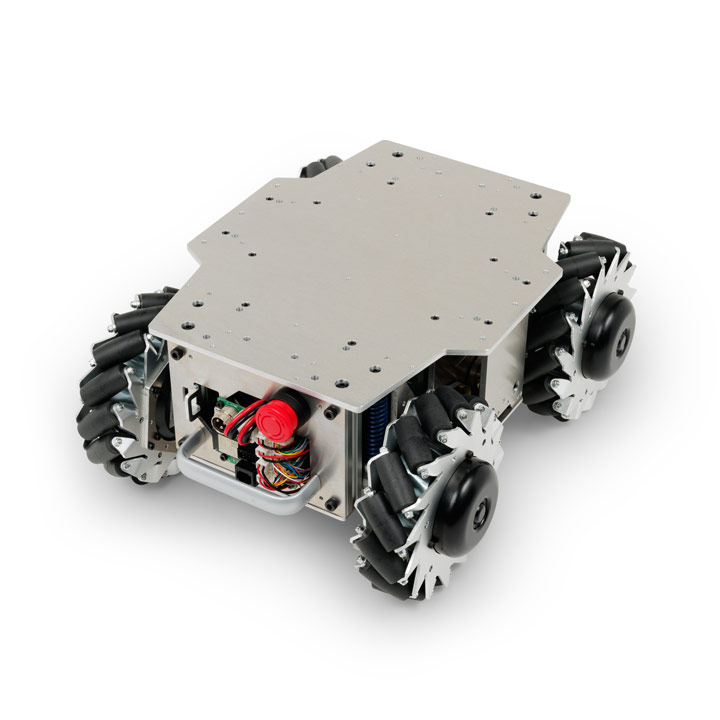
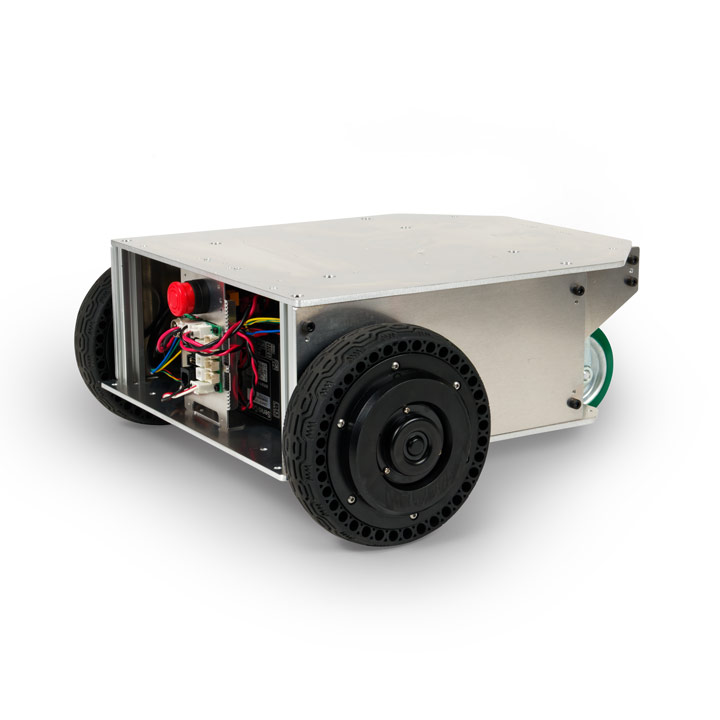
| ��ԃ��{�b�gVer.2.1�V���[�Y | ���K���[�o�[F120 | ���J�i�����[�o�[G120 |
 |
||
| ��ԃ��{�b�gVer.2.0�V���[�Y |
���i�J�^���O
���i��r�\
 4WDS���[�o�[ X120A |
 4WDS���[�o�[ X40A |
 ���J�i�����[�o�[Ver.3.0 |
 ���K���[�o�[Ver.3.0 |
 ���K���[�o�[Ver.3.0 ���O�Ή��� |
 ���K���[�o�[F120A |
 ���J�i�����[�o�[G120A |
 ���K���[�o�[Ver2.1 |
 ���J�i�����[�o�[Ver2.1 |
 4WDS���[�o�[Ver2.1 |
���K���[�o�[F120 |
���J�i�����[�o�[G120 |
 JetBot Mega |
 JetBot Mecanum |
|
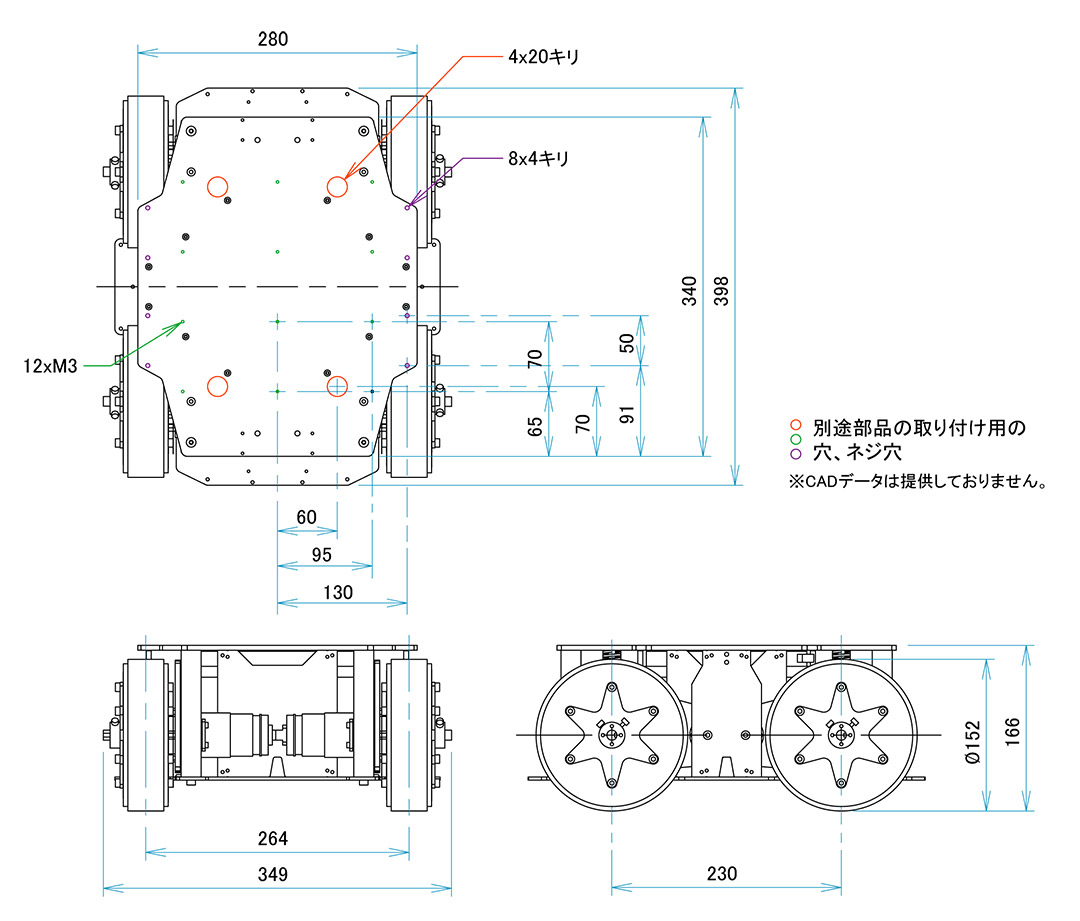
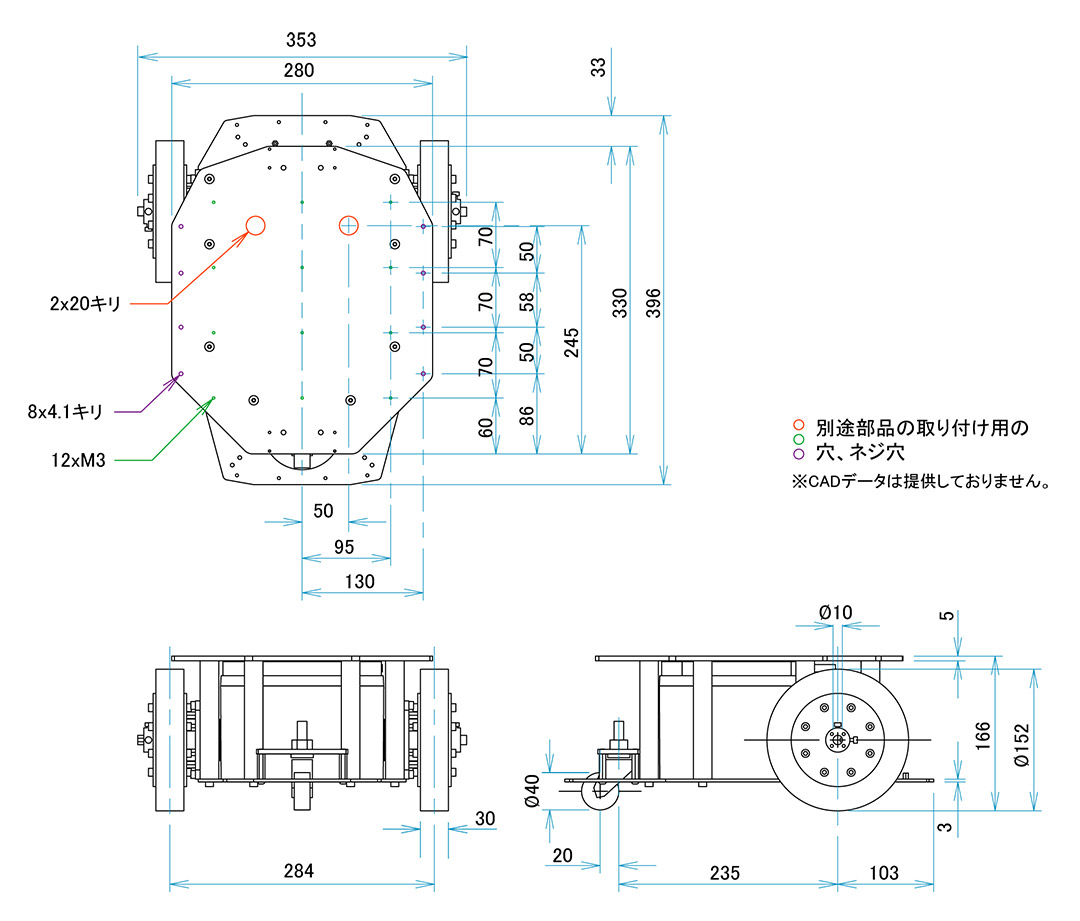
| �S�� | 476mm | 430mm | 392mm | 359.5mm | 611mm | 468mm | 603mm | 396mm | 398mm | 383mm | 459mm | 592mm | 396mm | 398mm |
| �S�� | 519mm | 430mm | 323mm | 357mm | 585mm | 482mm | 446mm | 353mm | 349mm | 376mm | 435mm | 497mm | 353mm | 349mm |
| �S�� | 235mm | 194mm | 165mm | 150mm | 199mm | 191mm | 203mm | 166mm | 166mm | 193mm | 200mm | 203mm | 166mm | 166mm |
| �{�̏d�� | ��43.6kg | ��28.4kg | ��17.9kg | ��14.2kg | ��28.5kg | ��33kg | ��48.8kg | ��15kg | ��20kg | - | ��33.2kg | ��70kg | ��16kg | ��21kg |
| �ύڏd�� | ��120kg | ��40kg | ��30kg | ��120kg | ��40kg | ��120kg | ��40kg | |||||||
| �ō����x �i�����l�j |
1.6m/s | 1.4m/s | 1.3m/s | 1.5m/s | 1.2m/s | 1.3m/s | 1.4m/s | 1.3m/s | ||||||
| �o�b�e���[ | 24V�V�[�����o�b�e���[ 528Wh | 24V�V�[�����o�b�e���[ 288Wh | 24V�V�[�����o�b�e���[ 624Wh | 12V�V�[�����o�b�e���[ 312Wh | 24V�V�[�����o�b�e���[ 624Wh | 12V�V�[�����o�b�e���[ 312Wh | ||||||||
| �ғ����� �i�ڈ��j |
��24���� | ��42���� | ��75���� | ��46���� | ��30���� | ��21���� | ��25���� | ��65���� �����ύڂ�0.3m/s�葬���s�� | - | ��30���� | ��21���� | |||
| �쓮���� | �l�쓮 �l�֓Ɨ��X�e�A�����O | �l�쓮 �l�֓Ɨ��X�e�A�����O �T�X�y���V���� | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� | ��쓮 �㕔�L���X�^�[�~1 | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� | ��쓮 �㕔�L���X�^�[�~1 | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� | �l�쓮 �l�֓Ɨ��X�e�A�����O �T�X�y���V���� | ��쓮 �㕔�L���X�^�[�~1 | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� | ��쓮 �㕔�L���X�^�[�~1 | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� |
||
| �^�C�����a | 170mm | 140mm | 152mm | 140mm | 170mm | 203mm | 152mm | 122mm | �쓮�ցF200mm �]���ցF100mm | 203mm | 152mm | |||
| ���[�^�[ | BLDC���[�^�[ 40W�~4�A150W�~4 | BLDC���[�^�[ 40W�~8 | BLDC���[�^�[ 40W�~4 | BLDC���[�^�[ 40W�~2 | �h�o�h�H�^ BLDC���[�^�[ 40W�~2 | BLDC���[�^�[ 150W�~2 | BLDC���[�^�[ 150W�~4 | DC���[�^�[ 40W�~2 | DC���[�^�[ 40W�~4 | DC�u���V���X���[�^�[ �~4 DC���[�^�[ �~4 | DC���[�^�[ 70W�~2 | DC���[�^�[ 70W�~4 | DC���[�^�[ 40W�~2 | DC���[�^�[ 40W�~4 |
| ��]���o | ���C���G���R�[�_ | �G���R�[�_ | �z�[���f�q �G���R�[�_ ���v�G���R�[�_�I�v�V�����i�ʔ��j | �G���R�[�_ | ||||||||||
| ������ | VS-WRC058c | VS-WRC058 | VS-WRC051 | |||||||||||
| SDK | VS-WRC058�p Arduino���C�u�����[�AROS�p�b�P�[�W | VS-WRC051�pArduino���C�u���� ROS�p�b�P�[�W | ||||||||||||
| ���^�T���v�� | [Arduino���C�u����] �ԗ���/ ���x,�ʒu�ǂݎ��/ �e��ʐM�@�\�� [ROS�p�T���v���R�[�h] �Q�[���p�b�h����̑���/ �}�E�X�i�^�b�`�p�b�h�j����̑���/SLAM�igmapping�j/ navigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B | [Arduino���C�u����] �ԗ���/ �G���R�[�_�ǂݎ��/ �e��ʐM�@�\�� [ROS�p�T���v���R�[�h] �Q�[���p�b�h����̑���/ �}�E�X�i�^�b�`�p�b�h�j����̑���/SLAM�igmapping�j/ SLAM(cartographer)/ navigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B | ||||||||||||
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�iIEEE802.11b/11g/11n�j�ABluetooth�iBluetooth Classic�ABLE 4.2�j ��Bluetooth�̋@�\�̓\�t�g�E�F�A�I�ɖ������̂��߁A���[�U�[�ł̊J���A�������K�v�ł��B | USB�V���A���AWi-Fi�ABluetooth Classic�ABLE | ||||||||||||
| �t���i | �[�d��A�������c�Z�b�g | |||||||||||||
| �ړ����� |  |
|
 |
 |
|
|
|
|
|
|
|
|
|
|
| ���i�i�ō��j | �₢���킹 | �₢���킹 | 605,000�~ | 385,000�~ | 715,000�~ | �₢���킹 | �₢���킹 | 385,000�~ | 550,000�~ | �₢���킹 | �₢���킹 | �₢���킹 | 495,000�~ | 660,000�~ |
�ȉ��̍s�͒������̗L���I�v�V�����ł�
4WDS���[�o�[ X120A |
4WDS���[�o�[ X40A |
���J�i�����[�o�[Ver.3.0 |
���K���[�o�[Ver.3.0 |
���K���[�o�[Ver.3.0 ���O�Ή��� |
���K���[�o�[F120A |
���J�i�����[�o�[G120A |
���K���[�o�[Ver2.1 |
���J�i�����[�o�[Ver2.1 |
4WDS���[�o�[Ver2.1 |
���K���[�o�[F120 |
���J�i�����[�o�[G120 |
JetBot Mega |
JetBot Mecanum |
|
| LRF | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z |
| �o���p�[ ���t�� |
�O�� �S���� | �O�� �S���� | �O�� �S���� | �O�� | - | �O�� | �O�� �S���� | �O�� | �O�� �S���� | �O�� �S���� | �O�� | - | �O�� | �O�� �S���� |
| Raspberry Pi | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | - | - |
| Nvidia Jetson Nano | - | - | - | - | - | - | - | - | - | - | - | - | �W���ő��� | �W���ő��� |
| Nvidia Jetson AGX Xavier | - | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | - | - |
| ROS�Ή�PC | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | - | - |
| �g���@��p�d����� | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �W���ő��� | �W���ő��� |
| ����~�X�C�b�` | �W���ő��� | �W���ő��� | �W���ő��� | �W���ő��� | �W���ő��� | �W���ő��� | �W���ő��� | �Z | �Z | �Z | �W���ő��� | �W���ő��� | �Z | �Z |
| ���C�����X�[�d | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z |
| �J�����X�e�[ | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z |
| �f�v�X�J���� | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �Z |
| �p���`���g���u | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �Z | �Z | �Z | �v���k | �v���k |
| �����[�g���� | �Z | �Z | �Z | �Z | - | �Z | �Z | �Z | �Z | �v���k | �v���k | �v���k | �v���k | �v���k |

�g���p���ނ̓��ڗ�
(�lj��H����)
�J�X�^�}�C�Y�̂��ē�
�����J���p��ԃ��{�b�g�́A�W���@�ł͎d�l�����Ȃ��A�ʓr�@��𓋍ڂ��Č������������Ƃ�������Ɨl�����ɁA���v�]�ɍ��킹���n�[�h�E�F�A�̃J�X�^�}�C�X���\�ł��B�J�X�^�}�C�Y�ɂ������p�A�[���ɂ��Ă͗v�����ƂɈقȂ�܂��̂ŁA�܂��͂��C�y�ɂ����k���������B
���₢���킹�͂�����
���Ȃ��A���q�l�Ǝ��̃V�X�e���Ɋւ���J���E�T�|�[�g�͍s���Ă���܂���B
�J�X�^�}�C�Y����
A�ЁF�ғ����Ԃ����邽�߂Ƀo�b�e���[��
B�ЁF�ύڏd��300�s�p�Ƀn�[�h�E�F�A�̐v
C�ЁF�ʓr�@��𓋍ڂ��邽�߂̎��t������V�ɒlj��H
D�ЁF�ʓr�@��𓋍ڂ���̂��߂̂₮��̐v�A���t��
E�ЁF�I�v�V�����i��LRF�ł͂Ȃ����[�U�[���w�肷��LRF�����t��
F�ЁF��苭�͂ȃ��[�^�[�ւ̕ύX
�V�Ɋւ��āA�W���̌��ȊO�ɂ�������K�v�ȏꏊ�������X�y�[�X�ł���A�lj��Ńl�W���Ȃǂ̉��H��
�\�ł��B
���̑��̉��H�`��ɂ��܂��ẮA�ʓr�����k���������B