ヴイストン株式会社

01本ページについて
本webページは、「RTミドルウェア」用のソフトウェア開発を目指す方のために、非常に簡単な台車式ロボットをベースにして、RTコンポーネント・RTミドルウェアの開発の基礎を学習することを目的として作成されました。なお、このページの内容は、RTミドルウェア学習キット「ビュートローバーRTC-BT ver.2」を使用することを前提に記述しております。
02RTコンポーネント・RTミドルウェアとは
RTミドルウェアとは、産業技術総合研究所が主体となって開発している、ロボット用のソフトウェア統合規格です。従来、ロボットやコントロールボードを制御する場合は、製品ごとに個別に決められたメッセージや通信方法を用いるため、その都度プログラムを新規開発するなどの手間が必要でした。そこで、各社が「RTミドルウェア」に準じたソフトウェアを提供することで、製品ごとの制御方法がある程度統一され、開発期間の短縮や別システムへの応用などが容易になります。
システムの構成としては、「RTコンポーネンツ」と呼ばれる、「モータを動かす」「センサ情報を読み取る」などの要素を持つ個別のプログラムを用います。RTコンポーネンツは、同一ネットワーク上で統一の通信メッセージを用いて通信することが可能です。あらかじめ用意されたRTコンポーネントが存在すれば、開発者はこれらを組み合わせるだけで、難しい要素技術を調査・開発することなく簡単にロボットを制御することが可能になります。
参考リンク
02OpenRTM-aist開発用キット「ビュートローバーRTC-BT ver.2」について
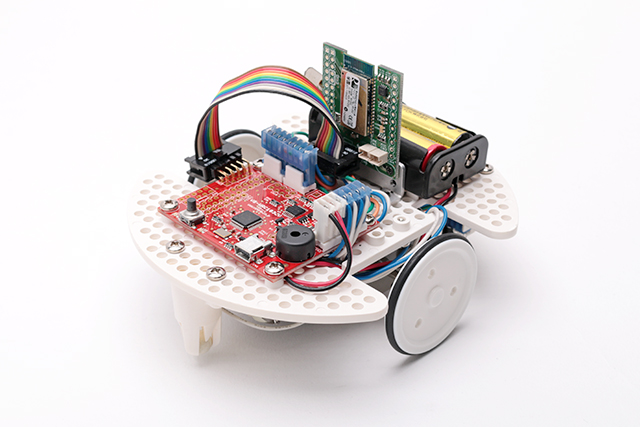
「ビュートローバーRTC-BT ver.2」は、OpenRTM-aistを用いたRTコンポーネント開発を学習するための台車型ロボットキットです。ビュートローバーRTC-BT ver.2は、外部PCからの無線制御ができるようにSPP対応のBluetooth3.0通信モジュールを組み込んでいます。モータ・センサ制御用のマイコンボードとは、Bluetoothによってシリアル通信制御を行います。
製品にはサンプルソースを付属し、それらを参照してRTコンポーネントの開発手順を学習することが出来ます。開発環境としてMicrosoft Visual Studio2005以降(別売)が必要です
本体仕様
| 外 形 | W112×D130×H60 (mm) |
|
|---|---|---|
| 重 量 | 230g(電池搭載時) | |
| 駆動方法 | タミヤ製ダブルギアボックス DCモータ×2 4段階にギア比の組み替えが可能 |
|
| センサ | 赤外線センサ×2 | |
| 電 源 | 単三型ニッケル水素電池×2(別売) | |
| フレーム | 5mmピッチ 円形ユニバーサルプレート | |
| 付属ソフトウェア | ビュート ビルダー2、VS-WRC003LVSDK、OpenRTM-aist用各種サンプルコード | |
| 基 板 | VS-WRC103LV(ARM/LPC1343搭載) | |
| インタフェース | Bluetoothオーディオ・シリアル通信モジュール「VS-BT003」 Bluetooth仕様:Bluetooth(R) 3.0 Class 2 Bluetoothプロファイル:A2DP, ARCP, HFP/HSP, SPP |
|
※製品の仕様は予告無く変更する場合がございますのでご了承ください
03開発環境
本記事では、プログラムの開発環境は以下を前提とします。プログラムの開発自体は他の環境でも可能ですが、開発環境の構築や動作確認は保証いたしかねますのでご了承ください。
- OS:Windows XP/Vista/7
- 開発言語:Microsoft Visual Studio2005及び2008(C++)
また、本システム用の開発ライブラリとして「VS-WRC003LV SDK」を使用します。このライブラリは、ロボットのCPUボード「VS-WRC003LV」と通信・制御を行うものです。このライブラリの使用方法については、下記のwebページを参照してください。
なお、本記事のサンプルソース(プロジェクト)は、全てVisual Studio 2005にて作成しております。
04ご購入・オプション
ビュートローバーRTC-BT ver.2は組立てキットでの販売です。完成版での出荷も承っておりますので、ご相談ください。
ビュートローバーRTC-BT ver.2

ビュートローバーRTC-BT ver.2の通常版組み立てキットです。
価格:20,241円(税抜)

VS-BTプログラマ2

VS-BT003の設定(ボーレート・識別名・pinコード等の変更)を行うために必要なモジュールです。
5,500円(税抜)
