���C�X�g���������

NEWS�����J���p��ԃ��{�b�g�u���K���[�o�[Ver2.0�v�̃����^���T�[�r�X���J�n

���K���[�o�[Ver2.0�ɑ�\����镾�А���^��ԃ��{�b�g�́AArduino�݊���𓋍ڂ������Ƃɂ���舵���̗e�Ր���A�A���~�V�̉��H���s�����Ƃɂ��J�X�^�}�C�Y���A
ROS�f�o�C�X�Ƃ��ē��삷�邱�Ƃɂ��ėp���̍����A�\���ȉ��d�ʂƂ���������������Ă���A�����E�J���ړI�ł̊��p�̂ق��A���p��������ɓ��ꂽ������ւ̉������Ƃ������p�r�ł��A�L���^�p����Ă��܂��B
�����̐��i�́A�N���X���l����Ə\���Ɉ����ɐݒ肳��Ă��܂����A�l�X�ȏ�ʂŊ��p����邪�䂦�A�{�̑�����p���������Ƃ������v�]��A�Z���Ԃŕ]�����s�������Ƃ��������N�G�X�g���������Ă��܂����B�{�T�[�r�X�͂������������ɂ�����������̂ŁA�����\�Ȍ����J���p��ԃ��{�b�g���A����ɑ����̌���œ������������܂��B
| ��� | �@�̎d�l | �����^������ �� | �Q�l�����^����p�i�ŕʁj �� | ���[�U�[�ł̋@�̉��� |
|---|---|---|---|---|
| �Z�������^�� | ���K���[�o�[Ver2.0 �ʏ�@�� |
10���� | 5,000�~/�� | �s�� |
| ���������^��A | ���K���[�o�[Ver2.0 �ʏ�@�� |
6�����` | ����6�����F40,000�~/�� �_�����F20,000�~/�� |
�� |
| ���������^��B | ���K���[�o�[Ver2.0 �o���p�[�Z���T�[�ALRF�����@�� |
6�����` | ����6�����F60,000�~/�� �_�����F25,000�~/�� |
�� |
�����������^���ɂ����郌���^�����Ԃɂ��ẮA���v�]�ɉ����Ē����\�ł��B
�܂��A�����^����p�̓����^�����Ԃɂ��ϓ����܂��B�ڂ����͂��₢���킹���������B
01�����ŗe�ՂɎ�舵���\�Ȍ����J���p��ԃ��{�b�g
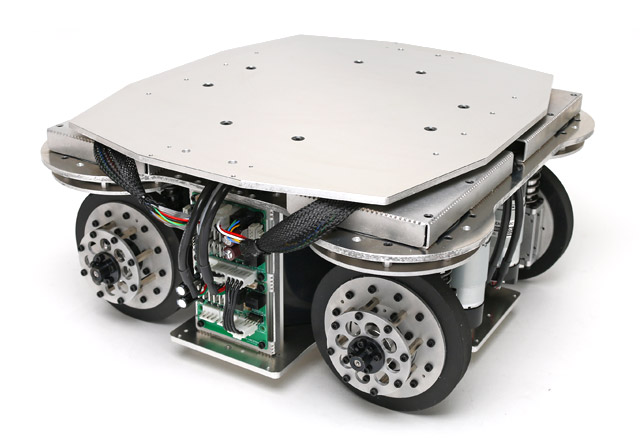
�����ȓ�쓮��ԃ��{�b�g�u���K���[�o�[Ver2.0�v
350,000�~(�Ŕ�)�ƈ�����2�쓮��ԃ��{�b�g�ł��B�A���~�t���[���ɂ��y�ʂō������ȃ��{�b�g�ƂȂ�A���d�ʖ�40 kg�A�ō����x1.4m/s���������Ă��܂��B��^�̉��o�b�e���[�𓋍ڂ��Ă��邽�߁A�o�b�e���[�쓮���Ԃ�30���Ԉȏて�ƒ����A���������X���[�Y�ɍs�����Ƃ��ł��܂��B�����ړ�ROS���{�b�g�������Ԃ̌����J���p�x�[�X���{�b�g�Ƃ��āA���l�ȗp�r�ł��g�����������܂��B
�����ύځA0.3m/s�ł̒葬���s�ɂ��Q�l�l�ł��B
 |
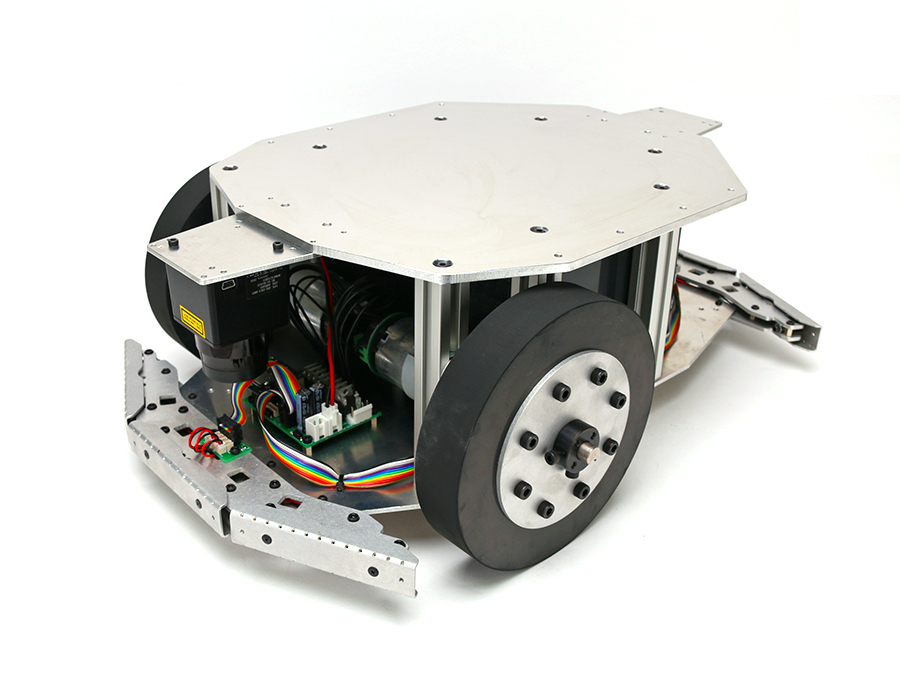 |
- ���@:L396�o�~W353�o�~H166�o
- �ύڏd��:40kg
- �쓮����:2�쓮(�ԗa152�o)�A�㕔�L���X�^�[1��
- ���[�^:DC���[�^ 40W(�G���R�[�_�ł̉�]���o�\)
- �ō����x:1.4m/s
- �I�v�V����:�o���p�[/���[�U�[�����W�t�@�C���_�[/Raspberry Pi 3B
���i:350,000�~(�ŕ�)
�����R���g���[���ŊȒP����
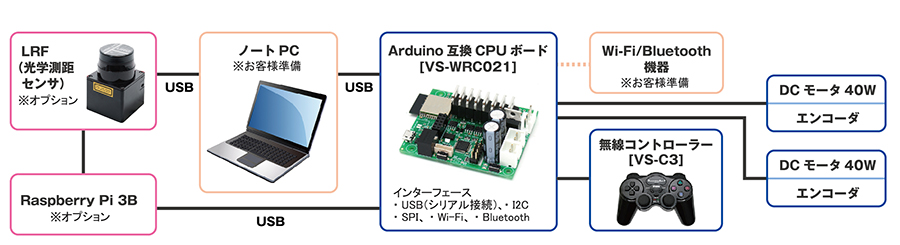
���K���[�o�[Ver2.0�́A���̌����p��ԃ��{�b�g�Ɠ��l�ɁA�t�������p�����R���g���[���uVS-C3�v���g�p���ĊȒP�ɑ��s�����邱�Ƃ��ł��܂��B�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
����/�L���ڑ��Ő���
���K���[�o�[Ver2.0�́AWi-Fi / BLE / Bluetooth Classic��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���烁�K���[�o�[Ver2.0�𐧌䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�Ő���
���K���[�o�[Ver2.0�́AWi-Fi�܂���USB�V���A���ʐM��p����ROS���ɐڑ����邱�Ƃ��ł��܂��BROS�̃��b�Z�[�W�ʐM�ɑΉ����Ă���̂ŁA�킸�����s�̃R�[�h�Ń��{�b�g�{�̂Ɏw�ߒl�𑗐M���邱�Ƃ��ł��܂��BROS�̃��C�u������������������V�X�e���̍\�z���\�ł��B
�܂��A�s�̂̃Q�[���p�b�h���g���đ��삷��T���v����ASLAM���s���T���v�����Ȃǂ��t�����Ă��܂��B�Z�b�g�A�b�v�シ���Ƀ��K���[�o�[�𑀍삵����A����v���O�����쐬���̎Q�l�����Ƃ��Ă����g�������܂��B
��SLAM�T���v���̎��{�ɂ̓��{�b�g�{�̂ւ̃��[�U�[�����W�t�@�C���_�̓��ڂ��K�v�ł��B���[�U�[�����W�t�@�C���_��t���I�v�V�����̂����p���֗��ł��B
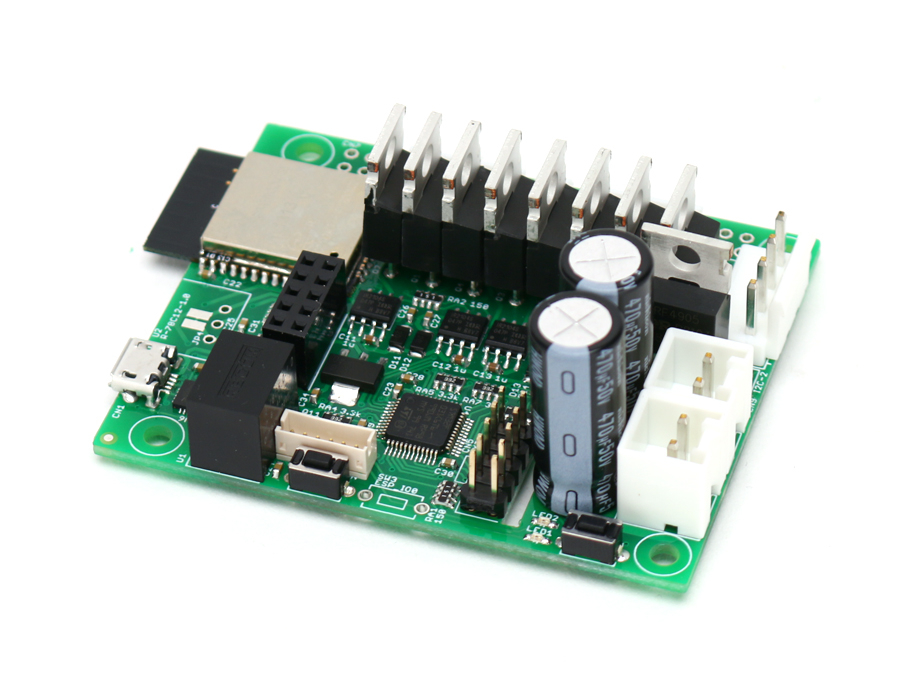
Arduino IDE�Ńv���O�����\
ESP32-WROOM-32�𓋍ڂ�������{�[�h�́uVS-WRC021�v��Arduino�݊��ƂȂ��Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��\�ł��B���i�t���̃��C�u�����ɂ̓��[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��ł��܂��B
�@�\���g������I�v�V����
���K���[�o�[Ver2.0�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- �o���p�[�Z���T
�@�̂̑O��Ɏ��t���A���̂Ƃ̏Փ˂����m���܂��B - ���[�U�[�����W�t�@�C���_
���[�U�[����p���āA�@�̂̎��͂ɑ��݂����Q����ǂ̈ʒu�����擾���邱�Ƃ��ł��܂��B - Raspberry Pi 3B
VS-WRC021����d���������邱�Ƃ��ł��A����R���s���[�^�Ƃ��Ďg�p���邱�Ƃ��ł��܂��B
�y���p����z
�����w���H�w�� �c�茤����
�����e�[�}�F�����ȃZ���T�ɂ�鎩���^�]�����n�}����
�c�茤�����ł́A�ԍډ\�Ȉ����ȃZ���T�Œn�}�������s���������s���Ă��܂��B
�����^�]�Ԃ͒n�}�𗘗p���Ȃ��ƃX���[�Y�ȓ����͂ł��܂��A�n�}�̐����R�X�g�͂ƂĂ������Ƃ�����肪����܂��B
�����ȃZ���T�ł̒n�}�����@�\�̊ȈՃe�X�g�Ƃ��āA�������ʂ������^�]�p�\�t�g�E�F�AAutoware�ɑg���݁A
Autoware���烁�K���[�o�[�𐧌䂵�܂����B

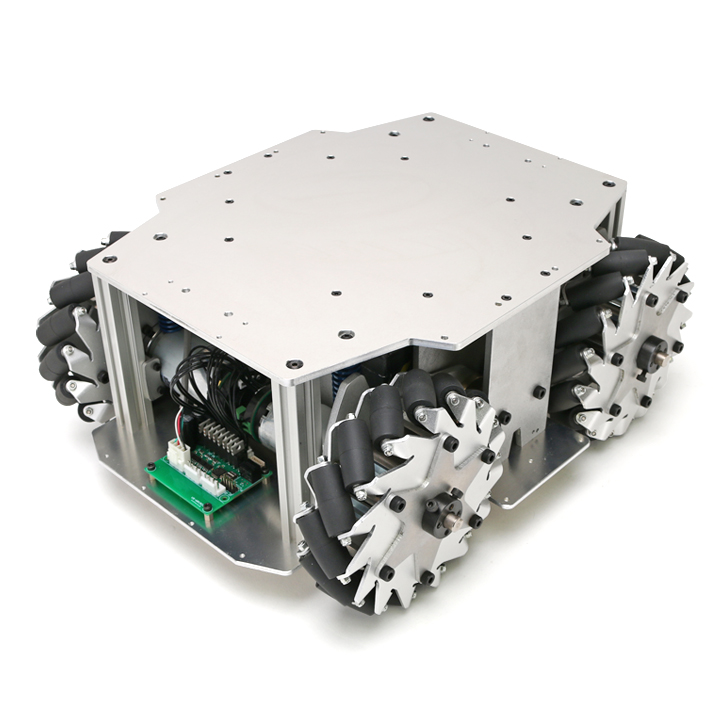
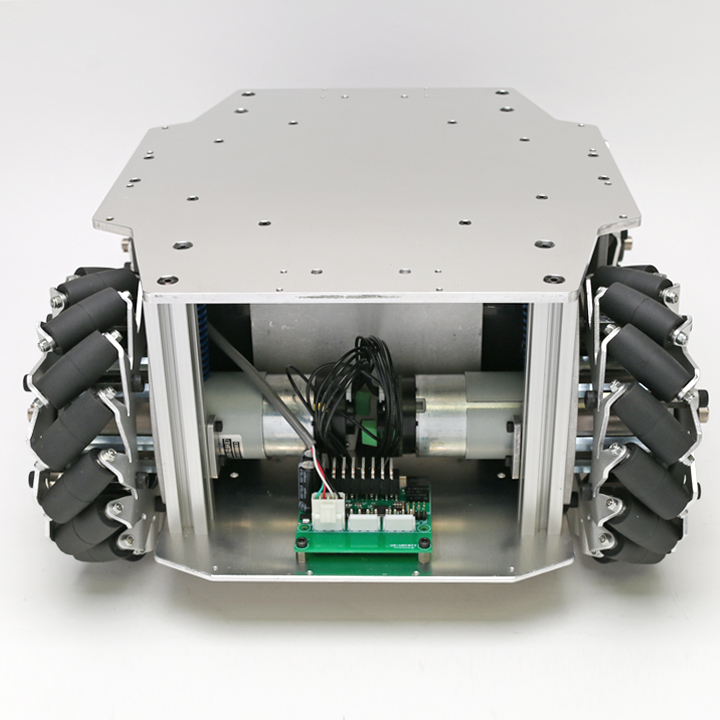
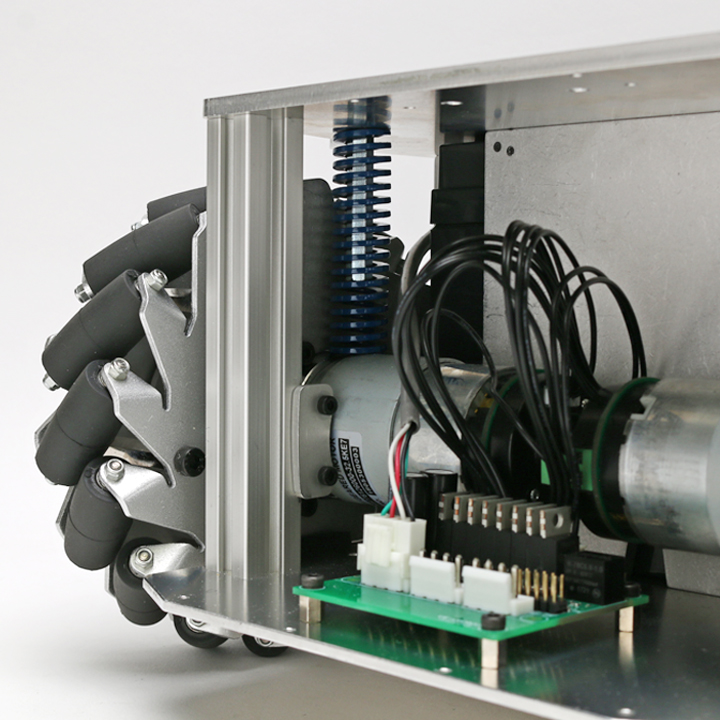
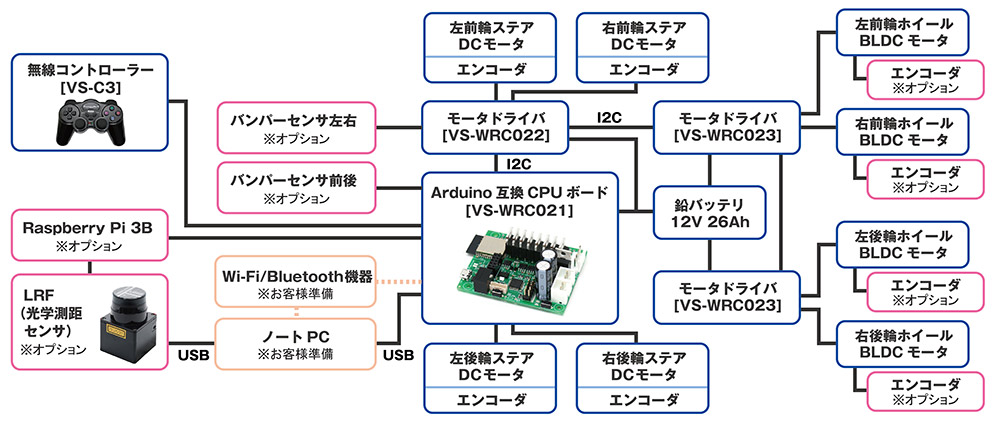
���J�i���z�C�[�����ڂ̌����J���p��ԃ��{�b�g�u���J�i�����[�o�[Ver2.0�v
�S�ւ̃��J�i���z�C�[���𓋍ڂ����S���ʈړ���ԃ��{�b�g�ł��B�O�i�E��ށE����y�ѕ��s�ړ����\�ȍ����@�����B�T�X�y���V�����Ɖ�����̏��Ȃ��\���̗̍p�ɂ��A���肵�����s���\�ł��B���d�ʖ�40 kg�A�ō����x1.3m/s���������Ă��܂��B��^�̉��o�b�e���[�𓋍ڂ��Ă��邽�߁A�o�b�e���[�쓮���Ԃ�21���Ԉȏて�ƒ����A���������X���[�Y�ɍs�����Ƃ��ł��܂��B�����ړ�ROS���{�b�g�������Ԃ̌����J���p�x�[�X���{�b�g�Ƃ��āA���l�ȗp�r�ł��g�����������܂��B
�����ύځA0.3m/s�ł̒葬���s�ɂ��Q�l�l�ł��B
 |
 |
 |
 |
�����R���g���[���ŊȒP����
�t�������p�����R���g���[���uVS-C3�v���g�p���đO�㍶�E�ߕ����ւ̕��s�ړ������ȂǁA�ȒP�ɑ��s�����邱�Ƃ��ł��܂��B�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
����/�L���ڑ��Ő���
���J�i�����[�o�[Ver2.0�́AWi-Fi / BLE / Bluetooth Classic��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���烁�J�i�����[�o�[Ver2.0�𐧌䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�Ő���
���J�i�����[�o�[Ver2.0�́AWi-Fi�܂���USB�V���A���ʐM��p����ROS���ɐڑ����邱�Ƃ��ł��܂��BROS�̃��b�Z�[�W�ʐM�ɑΉ����Ă���̂ŁA�킸�����s�̃R�[�h�Ń��{�b�g�{�̂Ɏw�ߒl�𑗐M���邱�Ƃ��ł��܂��BROS�̃��C�u������������������V�X�e���̍\�z���\�ł��B
�܂��A�s�̂̃Q�[���p�b�h���g���đ��삷��T���v����ASLAM���s���T���v�����Ȃǂ��t�����Ă��܂��B�Z�b�g�A�b�v�シ���Ƀ��J�i�����[�o�[Ver2.0�𑀍삵����A����v���O�����쐬���̎Q�l�����Ƃ��Ă����g�������܂��B
��SLAM�T���v���̎��{�ɂ̓��{�b�g�{�̂ւ̃��[�U�[�����W�t�@�C���_�̓��ڂ��K�v�ł��B���[�U�[�����W�t�@�C���_��t���I�v�V�����̂����p���֗��ł��B
Arduino IDE�Ńv���O�����\
ESP32-WROOM-32�𓋍ڂ�������{�[�h�́uVS-WRC021�v��Arduino�݊��ƂȂ��Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��\�ł��B���i�t���̃��C�u�����ɂ̓��[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���G�Ȑ����v���郁�J�i���z�C�[����Ԃł��A���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��ł��܂��B
�@�\���g������I�v�V����
���J�i�����[�o�[Ver2.0�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- �o���p�[�Z���T�i�O��j
�@�̂̑O��Ɏ��t���A���̂Ƃ̏Փ˂����m���܂��B - �o���p�[�Z���T�i�S���́j
�@�̂̑O�㍶�E�Ɏ��t���A�������ړ����ɂ����̂Ƃ̏Փ˂����m���܂��B - ���[�U�[�����W�t�@�C���_
���[�U�[����p���āA�@�̂̎��͂ɑ��݂����Q����ǂ̈ʒu�����擾���邱�Ƃ��ł��܂��B - Raspberry Pi 3B
VS-WRC021����d���������邱�Ƃ��ł��A����R���s���[�^�Ƃ��Ďg�p���邱�Ƃ��ł��܂��B
ROS����̃C���[�W�i�g�p�@�̂̓��K���[�o�[Ver2.0�ł��B�j
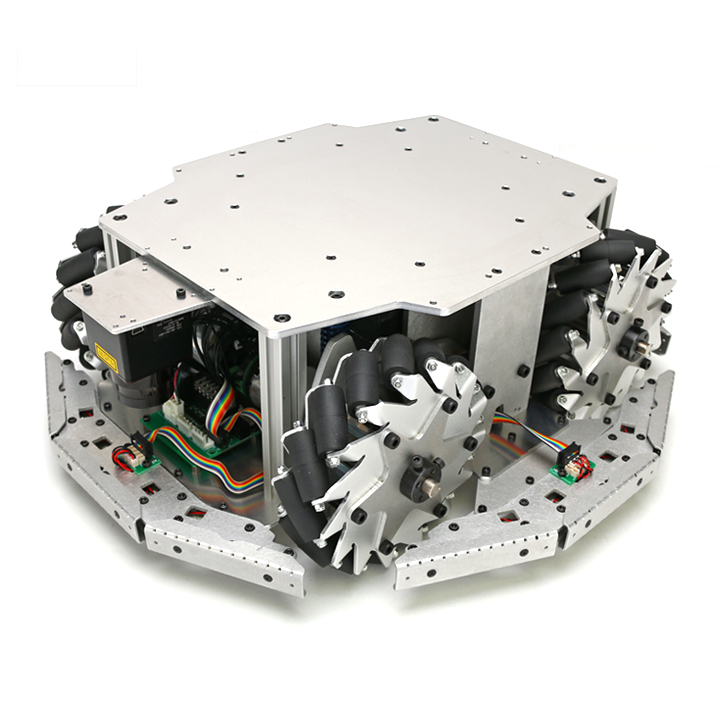
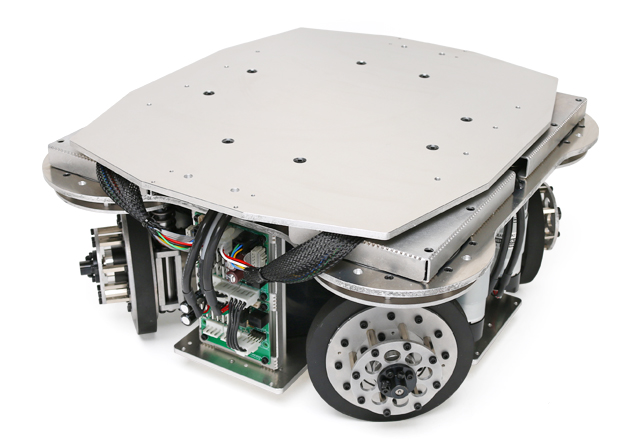
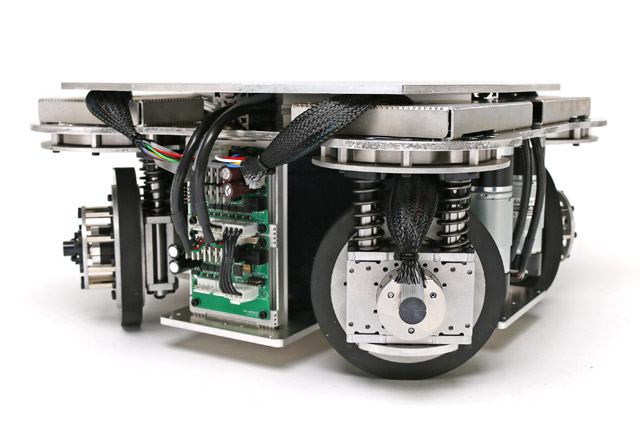
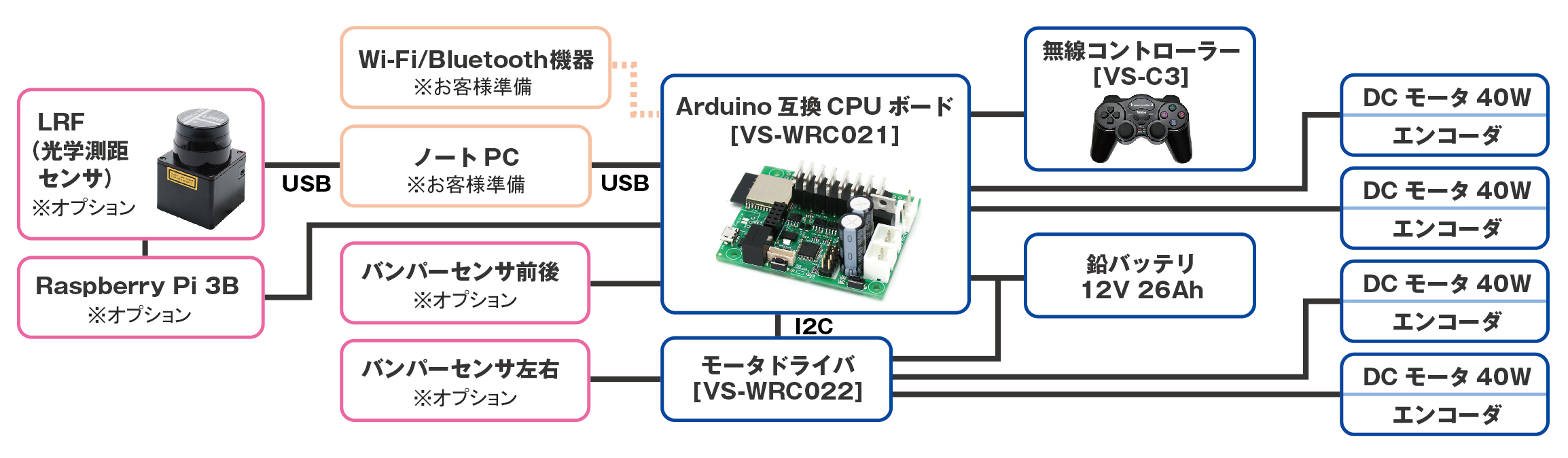
4�֓Ɨ��X�e�A�����O�쓮���S���ʈړ���ԃ��{�b�g�u4WDS���[�o�[Ver2.0�v
�S�֓Ɨ��X�e�A�����O�쓮�̑S���ʈړ����\�ȑ�ԃ��{�b�g�ł��B���ׂ�Ȃǂ̈ʒu���ꂪ���Ȃ��X�e�A�����O�ɂ��S�����̕����]���E�ړ����\�ł��B�T�X�y���V�����ɂ����4�̋쓮�ւ��ڒn���邽�߁A�������i�����������Ă��܂��B�m�[�}���Ȏԗւɂ��A�ړ����͐Â��ȓ_�������ł��B���d�ʖ�40kg�A�ō����x1.6m/s���������Ă��܂��B��^�̉��o�b�e���[�𓋍ڂ��Ă��邽�߁A�o�b�e���[�쓮���Ԃ�25���Ԉȏて�ƒ����A���������X���[�Y�ɍs�����Ƃ��ł��܂��B�����ړ�ROS���{�b�g�������Ԃ̌����J���p�x�[�X���{�b�g�Ƃ��āA���l�ȗp�r�ł��g�����������܂��B
�����ύځA0.3m/s�ł̒葬���s�ɂ��Q�l�l�ł��B
 |
 |
 |
 |
�����R���g���[���ŊȒP����
�t�������p�����R���g���[���uVS-C3�v���g�p���đO�㍶�E�ߕ����ւ̕��s�ړ������ȂǁA�ȒP�ɑ��s�����邱�Ƃ��ł��܂��B�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
����/�L���ڑ��Ő���
4WDS���[�o�[Ver2.0�́AWi-Fi / BLE / Bluetooth Classic��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X����4WDS���[�o�[Ver2.0�𐧌䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�Ő���
4WDS���[�o�[Ver2.0�́AWi-Fi�܂���USB�V���A���ʐM��p����ROS���ɐڑ����邱�Ƃ��ł��܂��BROS�̃��b�Z�[�W�ʐM�ɑΉ����Ă���̂ŁA�킸�����s�̃R�[�h�Ń��{�b�g�{�̂Ɏw�ߒl�𑗐M���邱�Ƃ��ł��܂��BROS�̃��C�u������������������V�X�e���̍\�z���\�ł��B
�܂��A�s�̂̃Q�[���p�b�h���g���đ��삷��T���v����ASLAM���s���T���v�����Ȃǂ��t�����Ă��܂��B�Z�b�g�A�b�v�シ����4WDS���[�o�[Ver2.0�𑀍삵����A����v���O�����쐬���̎Q�l�����Ƃ��Ă����g�������܂��B
��SLAM�T���v���̎��{�ɂ̓��{�b�g�{�̂ւ̃��[�U�[�����W�t�@�C���_�̓��ڂ��K�v�ł��B���[�U�[�����W�t�@�C���_��t���I�v�V�����̂����p���֗��ł��B
Arduino IDE�Ńv���O�����\
ESP32-WROOM-32�𓋍ڂ�������{�[�h�́uVS-WRC021�v��Arduino�݊��ƂȂ��Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��\�ł��B���i�t���̃��C�u�����ɂ̓��[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���G�Ȑ����v����4WDS�z�C�[����Ԃł��A���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��ł��܂��B
�@�\���g������I�v�V����
4WDS���[�o�[Ver2.0�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- �o���p�[�Z���T�i�O��j
�@�̂̑O��Ɏ��t���A���̂Ƃ̏Փ˂����m���܂��B - �o���p�[�Z���T�i�S���́j
�@�̂̑O�㍶�E�Ɏ��t���A�������ړ����ɂ����̂Ƃ̏Փ˂����m���܂��B - ���[�U�[�����W�t�@�C���_
���[�U�[����p���āA�@�̂̎��͂ɑ��݂����Q����ǂ̈ʒu�����擾���邱�Ƃ��ł��܂��B - �z�C�[�����[�^�p�G���R�[�_
�z�C�[�����[�^���G���R�[�_���g�p���Đ��䂷�邱�Ƃ��ł���悤�ɂȂ邽�߁A��萸�m�ɑ��s���邱�Ƃ��ł���悤�ɂȂ�܂��B - Raspberry Pi 3B
VS-WRC021����d���������邱�Ƃ��ł��A����R���s���[�^�Ƃ��Ďg�p���邱�Ƃ��ł��܂��B
ROS����̃C���[�W�i�g�p�@�̂̓��K���[�o�[Ver2.0�ł��B�j
02���i�d�l
| ���i�� (�^��) | ���J�i�����[�o�[Ver2.0 | ���K���[�o�[Ver2.0 | 4WDS���[�o�[Ver2.0 |
|---|---|---|---|
| ���i�i�Ŕ��j | 500,000�~ | 350,000�~ | �₢���킹 |
| �S�� | 398mm | 396mm | 383mm |
| �S�� | 349mm | 353mm | 376mm |
| �S�� | 166mm | 166mm | 188mm |
| �ύڏd�� | 40kg | ||
| �{�̍ގ� | �A���~�j�E�� | �@||
| �o�b�e���[ | 12V�V�[�����@312Wh | ||
| �쓮���� | 4�쓮 ���J�i���z�C�[�� �T�X�y���V���� | 2�쓮 �㕔�L���X�^�[1�� | 4�쓮 4�֓Ɨ��X�e�A�����O �T�X�y���V���� |
| �^�C�����a | 152mm | 122mm | |
| ���[�^ | DC���[�^�@40W�~4 | DC���[�^�@40W�~2 | DC�u���V���X���[�^�~4 |
| ��]���o | �G���R�[�_ | �z�[���f�q �G���R�[�_(�� �v �G���R�[�_�I�v�V����) |
|
| �ō����x�i�����l�j | 1.3m/s | 1.4m/s | 1.5m/s |
| ������ | VS-WRC021 | ||
| SDK | VS-WRC021�p Arduino���C�u���� ROS�p�b�P�[�W |
||
| ���^�T���v�� |
Arduino���C�u���� �E�ԗ��� �E�G���R�[�_�ǂݎ�� �E�e��ʐM�@�\�� ROS�p�T���v���R�[�h �E�Q�[���p�b�h����̑��� �E�}�E�X�i�^�b�`�p�b�h�j����̑��� �ESLAM�igmapping�j �ESLAM(cartographer) �Enavigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B |
||
| �C���^�[�t�F�[�X | USB�V���A��,Wi-Fi,Bluetooth Classic,BLE | ||
| �t���i | �[�d��A�������c�Z�b�g | ||
| �������I�v�V���� | �o���p�[�Z���T(�O��,�S��) ���[�U�����W�t�@�C���_�[ Raspberry Pi 3B | �o���p�[�Z���T ���[�U�����W�t�@�C���_�[ Raspberry Pi 3B | �o���p�[�Z���T(�O��,�S��) ���[�U�����W�t�@�C���_�[ �z�C�[�����[�^�p�G���R�[�_ Raspberry Pi 3B |
| ���w���͂����� |
���K���[�o�[Ver2.0 ���J�i�����[�o�[Ver2.0 4WDS���[�o�[Ver2.0 |
||
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��B
�J�X�^�}�C�Y�̂��ē�
�����J���p��ԃ��{�b�g�́A�W���@�ł͎d�l�����Ȃ��A�ʓr�@��𓋍ڂ��Č������������Ƃ�������Ɨl�����ɁA���v�]�ɍ��킹���n�[�h�E�F�A�̃J�X�^�}�C�X���\�ł��B�J�X�^�}�C�Y�ɂ������p�A�[���ɂ��Ă͗v�����ƂɈقȂ�܂��̂ŁA�܂��͂��C�y�ɂ����k���������B�Ȃ��A���q�l�Ǝ��̃V�X�e���Ɋւ���J���E�T�|�[�g�͍s���Ă���܂���B���₢���킹��������
�J�X�^�}�C�Y����
A�ЁF�ғ����Ԃ����邽�߂Ƀo�b�e���[��
B�ЁF�ʓr�@��𓋍ڂ��邽�ߎ��t������V�ɒlj��H
C�ЁF�ʓr�@��𓋍ڂ���̂��߂̂₮��̐v�A���t��
D�ЁF�I�v�V�����i��LRF�ł͂Ȃ����[�U�[���w�肷��LRF�����t��
E�ЁF��苭�͂ȃ��[�^�[�ւ̕ύX
03�n�[�h�E�F�A�\��
���K���[�o�[Ver2.0
���J�i�����[�o�[Ver2.0
4WDS���[�o�[Ver2.0
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
04�_�E�����[�h
Ubuntu�́ACanonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Arduino�́AArduino AG�̓o�^���W�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̏��W�܂��͓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
