ヴイストン株式会社

01「ビュートバランサー2」仕様紹介
Beauto Balancer2の詳細スペックは以下の通りです。
ビュートバランサー2仕様一覧
| 外形 | 177(H)×90(W)×42(D)mm |  |
|---|---|---|
| 重量 | 約150g(バッテリ非搭載時) | |
| モータ | FA-130-2270タイプDCコアードモータ×2(本体駆動用) | |
| CPU | NXPセミコンダクターズ社製 ARM Cortex-M3マイコン LPC1343 | |
| 搭載出力 | DCモータ出力×2、LED×2 | |
| センサ | ジャイロセンサ×1、ロータリーエンコーダ×2、DCモータ用双方向電流検出回路×2 | |
| インターフェース | USB(HID)×1、I2C×1、UART×1、無線コントローラ「VS-C3」接続ポート×1 | |
| 材質 | 樹脂(フレーム:PC、ホイール:POM) | |
| 制御方法 | 1.「バランサー2プログラマ」
| |
| 電源 | 単3アルカリ乾電池 または 単3型ニッケル水素充電池 2本(別売) 、USBバスパワー(モータなど一部機能を除く) | |
| 対応OS | Windows XP/Vista/7/8/8.1/10/11(日本語版) | |
| 価格 | 9,800円(税抜) | |
※製品の仕様は予告無く変更する場合がございますのでご了承ください
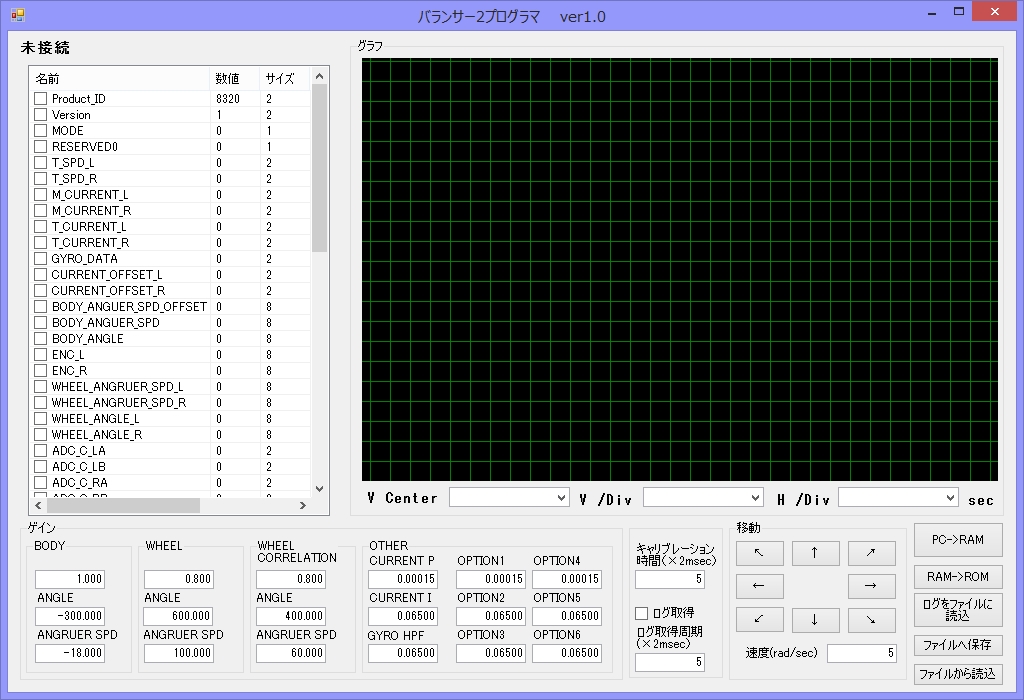
02制御ソフトウェア「バランサー2プログラマ」紹介
ビュートバランサー2を簡単に動作させるソフトウェアとしまして、「バランサー2プログラマ」をご利用いただけます。バランサー2プログラマは、ジャイロセンサのゲインやロボットの姿勢保持・移動などの設定を簡単に設定でき、初学者でも簡単にロボットを倒立させることができます。また、センサログの取得やグラフ表示機能を搭載し、簡単な実験・学習をすぐに行なうことができます。
動作環境
| OS | Windows/XP/Vista/7/8/8.1/10/11(日本語版) |
|---|---|
| CPU | Pentium-Ⅲ以降(1GHz 以上推奨) |
| RAM | 128MB |
| インターフェース | USB (HID) |
