ヴイストン株式会社

本製品は生産・販売終了しました。後継機種「ビュートバランサー2」はこちらになります。
01ダウンロード情報
ダウンロードリスト
- 専用ソフト「Balancer Duoプログラマ」一式
- Beauto Balancer Duo用ソフト「Balancer Duoプログラマ」
- Balancer Duoプログラマ取扱説明書
- Beauto Balancer Duo用ファームウェア
- USBシリアルドライバ(Windows2000/XP/Vista用)
- USBシリアルドライバ(Windows 7用)
- H8マイコン統合開発環境「HEW」、C言語サンプルソース
- H8マイコン統合開発環境「HEW」インストール&サンプルソースビルドマニュアル
- C言語サンプルソース「倒立振子」一式
- 参考資料
- ライントレースセンサ用遮光スカート
- BeautoBalancerDuo制御基板仕様
- Beauto Balancer Duo取扱説明書
02専用ソフト「Balancer Duoプログラマ」
Balancer Duoプログラマは、Beauto Balancer Duoのジャイロセンサゲインや車輪の駆動設定を簡単に設定できるソフトウェアです。本ソフトウェアで、本体を組み立てた後に簡単に倒立振子の動作を確認することができます。
- Beauto Balancer Duo用ソフト「Balancer Duoプログラマ」
- Balancer Duoプログラマ取扱説明書
- Beauto Balancer Duo用ファームウェア
- USBシリアルドライバ(Windows2000用)
- USBシリアルドライバ(Windows XP/Vista/7(32bit,64bit)/8(32bit,64bit)用)
出荷時に本体に書き込まれているファームウェアです。C言語で作成したプログラムを書き込んだ後に、Balancer Duoプログラマを使用する場合、必ず書き込みを行ってください。
WindowsXP以降のドライバは、ZIPファイルを解凍したらOSの環境(32bit/64bit)に合わせて実行ファイルを選択してください。
USBシリアルドライバは、PCとロボット本体が通信するために必要となりますので、必ずダウンロードしてPCにインストールしてください。
03H8マイコン統合開発環境「HEW」、C言語サンプルソース
本項目では、H8マイコン用C言語統合開発環境「HEW」のダウンロード、及びその環境に対応したBeautoBalancer Duo用のC言語サンプルソースを公開しております。
- H8マイコン統合開発環境「HEW」インストール&サンプルソースビルドマニュアル (PDF)
- C言語サンプルソース「倒立振子」一式
Beauto Balancer Duoのプログラミングを行うための、ルネサスエレクトロニクス社のH8マイコン用C言語統合開発環境「HEW」のインストール方法を解説した資料です。また、サンプルソースをビルドしてロボット本体に書きこむ手順についても説明しています。
C言語統合開発環境「HEW」でBeauto Balancer Duoを制御できるサンプルソース一式です。ビルドの際には各種設定変更などが必要のため、併せて以下の資料をご参照ください(Beauto Chaser及びVS-WRC003と同じ手順でビルドできます)。
※本サンプルソースを用いてロボットのCPUボードのプログラムを書き換えた場合、再度Balancer Duoプログラムで使用する場合は「Beauto Balancer Duo用ファームウェア」を書き込んでください。
04参考資料
本項目では、Beauto Balancer Duoに関する技術資料をダウンロードできます。
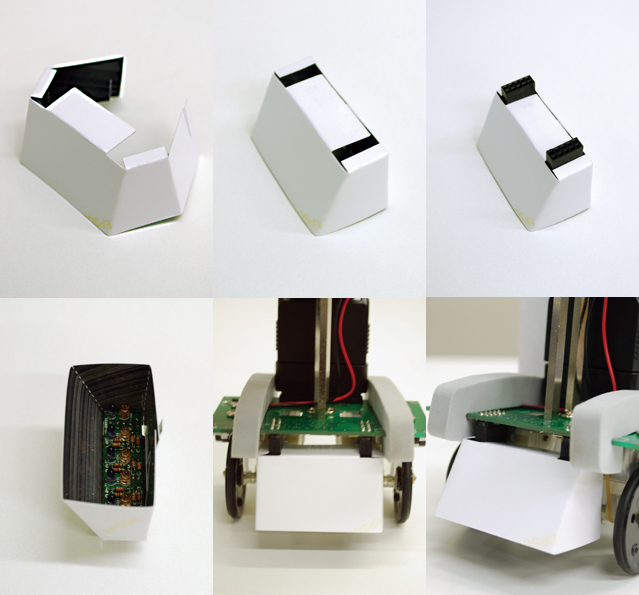
- ライントレースセンサ用遮光スカート (PDF)
- 組立て・取り付けにはこちらの画像をご参照ください。
Beauto Balancer Duo用のライントレースセンサは、外からの強い光が当たると影響を受けて誤動作する場合があります。そのような環境で安定して動作させる場合は、こちらのペーパークラフトを組み立てて本体に取り付けてください。
- Beauto Balancer Duo制御基板仕様 (PDF)
- Beauto Balancer Duo取扱説明書 (PDF)
Beauto Balancer Duoを用いてプログラミングする際に必要な情報を記載したマニュアルです。基板上の周辺回路図も一部記載されていますので、HEWを用いてプログラミングする際にご参考下さい。
Beauto Balancer Duoをご購入いただいた際に付属している取扱説明書です。
