���C�X�g���������

�{���i�͐��Y�E�̔��I�����܂����B��p���i�Ƃ����r���[�g���[�o�[�����Q�Ƃ��������B
01�uBeauto Balancer�v�d�l�Љ�
Beauto Balancer�̏ڍ׃X�y�b�N�͈ȉ��̒ʂ�ł��B
Beauto Balancer�d�l�ꗗ
| �O�` | 175(H)�~125(W)�~55(D)mm | 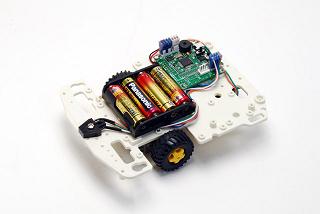 |
|---|---|---|
| �d�� | ��194g�i�o�b�e�����ڎ��j | |
| ���[�^�\�� | DC���[�^2����(�{�̋쓮�p) | |
| ���ڃZ���T | �E�ԊO�������Z���T�~1 �@�i�{�̑O�ʁB���t����ς��邱�ƂŃ��C���g���[�X��ԊO���{�[���T�m�ɉ��p�\�j | |
| CPU�{�[�h�d�l | VS-WRC003 DC���[�^�ő�2ch����\�A �A�i���O����4ch�擾�\ LED�~2���ځA���d�u�U�[���� ��P�̂ł̃v���O���~���O�\�A USB�ڑ��AH8/36064G���� | |
| ������@ | �E�EWindowsPC�p�\�t�g�E�F�A�uBeauto�r���_�[NEO�v�t�� �EC����J�����uHEW�v�uFDT�v�𗘗p�\ | |
| �d�� | �P3�A���J�����d�r 4�{(�ʔ�) | |
| �Ή�OS | Windows XP/Vista(���{���) | |
| �C���^�t�F�[�X | USB | |
| �̔����i(�Ŕ�) | 5,700�~ | |
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
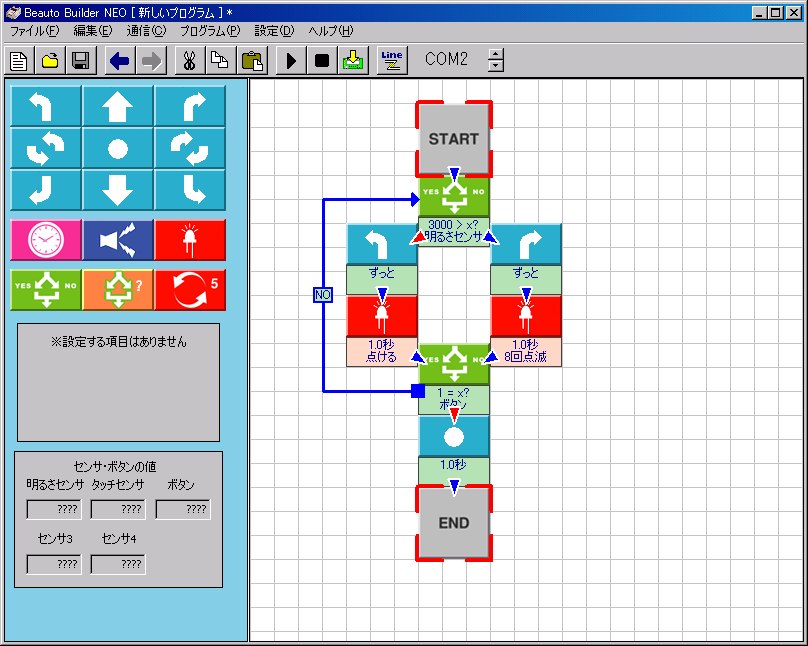
02�t���\�t�g�E�F�A�uBeauto�r���_�[NEO�v�@�d�l�Љ�
�@�{���i�ɂ́A��p�\�t�g�E�F�A�uBeauto�r���_�[NEO�v���t�����Ă���܂��BBeauto�r���_�[NEO�͏]����Beauto�ɕt�����Ă���Beauto�r���_�[���A����y�Ɉ�����`�ɉ��P���Ă���܂��B�]����Beauto�r���_�[�ł́A�uC����w�K�v�u�ϐ����Z�Ȃǂ̕��G�ȏ����v�u�f�[�^���K�[�v�ȂǁA���l�ȋ@�\�𓋍ڂ��邱�Ƃō��x�Ȋw�K���舵�����\�ł������A���̔��ʏ��S�҂ɂ͑��@�\�����Ď�����Â炢�ʂ�����܂����B
�@����ABeauto�r���_�[NEO�ł́ABeauto�r���_�[���u���߂̃A�C�R������ׂăt���[�`���[�g�`���Ńv���O�������쐬����v�Ƃ����������𒆐S�ɁA���߂̐ݒ荀�ڂ����₷���E�킩��₷���`���ɒu����������A�Z���T���̃��A���^�C���\����A�C�R���̃f�U�C���E�\�����@�̉��P�ȂǁA���߂ă��{�b�g�ɒ��킷���N��̕��ł��A���Ɏ��g�݂₷���Ȃ��Ă���܂��B
�����
| OS | Windows2000/XP/Vista |
|---|---|
| CPU | Pentium-�V�ȍ~�i1GHz �ȏ㐄���j |
| RAM | 128MB |
| �C���^�[�t�F�[�X | USB |
| ��ʃT�C�Y | XGA(1024�~768)�ȏ� |
| ���� | �E�v���O�����̍쐬�̓t���[�`���[�g�`���ɗގ�����������₷���C���^�t�F�[�X �E�O�i�E��ށE����A�y�шړ����̐���̊e��ړ���A�J��Ԃ��E��������E�����_���E�u�U�[�ELED�ȂNJ�{�I�Ȗ��߃R�}���h������ �E�{�\�t�g�E�F�A�ō쐬�����v���O���������{�b�g�{�̂ɋL�������A���{�b�g�P�̂Ŏ��s�����邱�Ƃ��\�B |
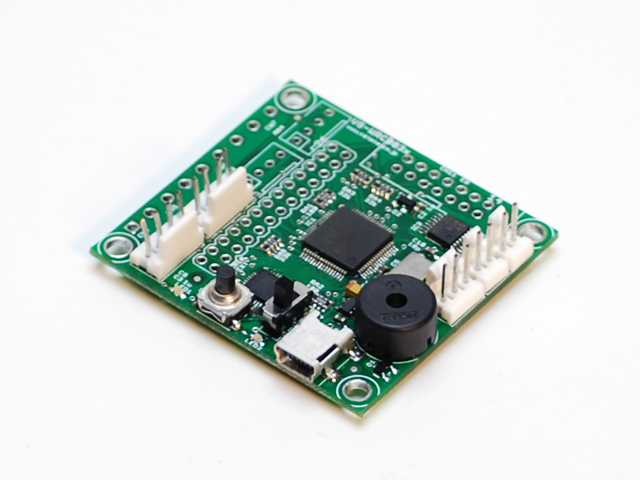
03Beauto Chaser����CPU�{�[�h�uVS-WRC003�v�d�l�Љ�
Beauto Chaser�ɓ��ڂ���Ă���CPU�{�[�h�uVS-WRC003�v�́A�Z���T��X�C�b�`�ނ̑��݁A�T�[�{���[�^�̐ڑ��A�Q�[���p�b�h�R�l�N�^�̊g���E�ڑ��ȂǍ��x�Ȋg�����\�ȃ}�C�R���{�[�h�ł��B�ڍׂ��ȉ��ɏЉ�܂��B
VS-WRC003�́A�s���w�b�_�lj���I/O���݂Ȃ�H8/Tiny�̋@�\���t���Ɋ��p�B�g���Z���T�ނȂǖL�x�ȃI�v�V��������葵���Ă���A�d�q�H��̃R�A�����Ƃ��Ă����̎��͂����܂��B�ʔ��̃Q�[���p�b�h�ڑ��R�l�N�^���g�p���ĕ��А�VS-C1�Ȃǂ̃Q�[���p�b�h��ڑ����邱�Ƃ��ł��܂��B
VS-WRC003 �d�l
| ���@ | 51x47x12mm |
|---|---|
| �d�� | 13g |
| CPU | H8/36064G |
| DC���[�^�o�� | 2ch |
| LED | 2�� |
| �C���^�[�t�F�[�X | USB |
| �A�i���O���� | 4ch |
| �u�U�[ | �P���o�͓��ځi���K�E���ʉρj |
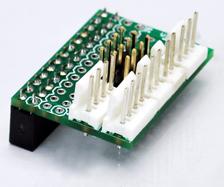
04VS-WRC003�pI/O�g���{�[�h�uVS-WRC004�v �Љ�
VS-WRC004�́AVS-WRC003�ɐڑ�����I/O�g���{�[�h�ł��B���[�^�o��2ch�E�A�i���O����2ch�EPWM�i����VS-S092J�Ȃǂ̃T�[�{���[�^�p�j�o��4ch������Ă���AVS-WRC003�{�̂Ƃ��킹�āA���[�^�o��4ch�iDC���[�^�EPWM�o�͂̍��v�j�E�A�i���O����6ch�܂�I/O���g�p�ł��܂��B�܂��A�ʌn������̓d�����͂�A�i���O���͂̃v���A�b�v�������\�ł��i�v�p�^�[���J�b�g�j�B
VS-WRC004 �d�l
| ���@ | 24(W)x33(D)mm |
|---|---|
| �d�� | 2g |
| ���[�^�o�� | DC���[�^�~2�APWM�~4 �iVS-WRC003�̃��[�^�o�͂ƍ��킹�āADC���[�^��PWM�����v�ōő�4ch�܂Ŏg�p�\�j |
| �Z���T���� | �A�i���O���́~2 |
| �t���� | �R�l�N�^�� �i�A�i���O���͗p2�ADC���[�^�o�͗p2�A�d���p1�j �s���w�b�_�i���X2�~13�A�I�X2�~20�e1�j |
| ���̑� | �ʓd�����͉\�A�v���A�b�v�����\ �i�v�p�^�[���J�b�g���H�j �R�l�N�^�A�s���w�b�_�͗v���c�t�� |
| ���i | 1,900�~(�Ŕ�) |
���i�ꗗ�EVS-WRC003�ւ̎��t��
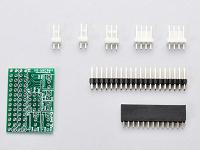

�{���i�́A��{�̂Ƀs���w�b�_�A�R�l�N�^����������Ă���܂���B���q�l�̗p�r�ɉ����ĕʓr���c�t�����Ă��������`�ɂȂ�܂��BVS-WRC003�ɓ��ڂ���ꍇ�́AVS-WRC003���Ƀs���w�b�_���͂t�����A������VS-WRC004��ڑ����܂��B
���p��
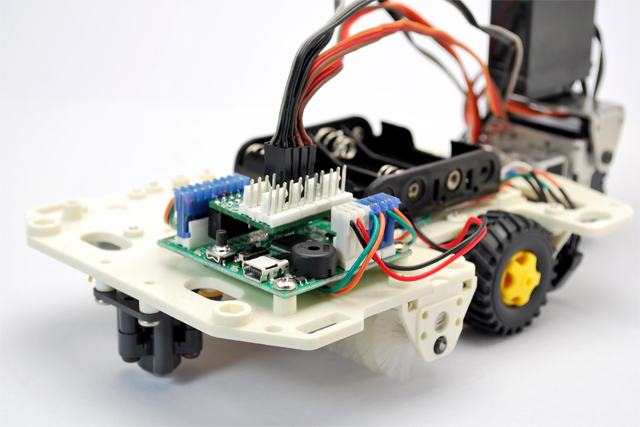
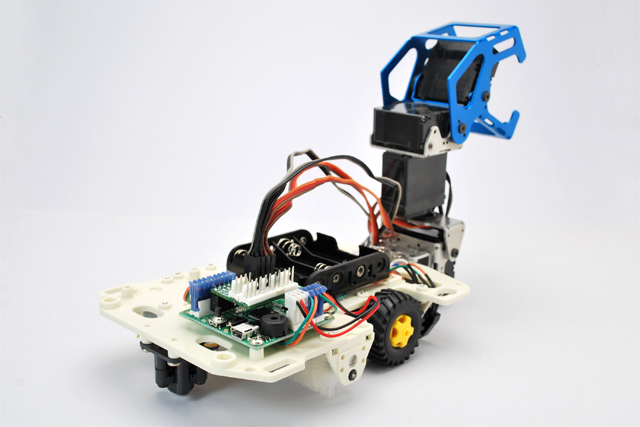
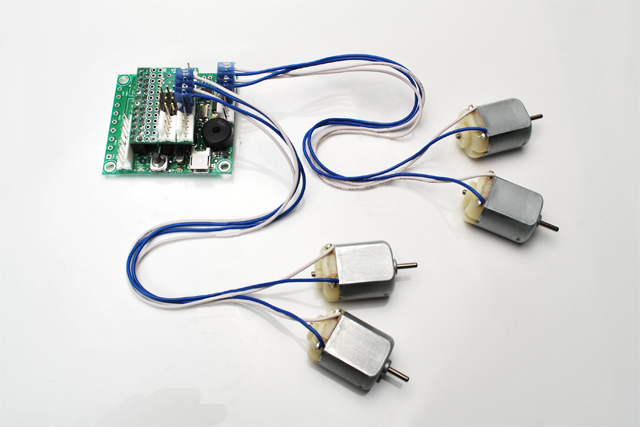
VS-WRC004�ɂ��g����ł��B���E�����̎ʐ^�́A���W�R���p�̃T�[�{���[�^�ɂ���Đ��삳�ꂽ3���̃��{�b�g�A�[����ڑ������Ƃ���ł��B�|�[�g�ɂ�DC���[�^��1ch�ڑ����Ă��܂��B�܂��A�E�̎ʐ^�́ADC���[�^��4ch�ڑ������Ƃ���ł��B���̂悤�ɁADC���[�^��PWM�����v��4ch�g�p���邱�Ƃ��ł��܂��B
