ヴイストン株式会社
サポート情報
本ページでは、ビュートレーサーのサポート情報について掲載します。製品をお使いの上でご不明な点、その他お困りな点などありましたら本ページをご参照ください。
よくあるご質問
- 動作について
- モーター、ホイールが回らない
- ビュートレーサーはバックさせることは出来ないのですか?
- 接続、通信について
- Windows7~11に対応していますか?
- MacOSに対応していますか?
- ビュートレーサーをPCのUSBポートに接続しても、Beauto Builder R上で未接続のまま、接続中の表示になりません
- USBケーブルで接続すると、通信が不安定になります
- 学校のパソコンでソフトウェアがうまく起動しません
- その他
- 上級者コースの回答案をください
- モーターホルダが折れてしまった
- 電池を逆に差し込んだら動かなくなった
- LED、赤外線センサー、電源スイッチが基板から取れてしまった
- タイヤのoリングが劣化して使えなくなりました
- 別売りの赤外線センサや、その他拡張センサの取り付けはどうすれば良いですか?
- シミュレータが動きません
動作について
- モーター、ホイールが回らない
- 01. 電池の残量が少ない可能性があります。新しい電池と交換してみてください。
- 02. モーターホルダーへのモーターの取り付けがズレているため、モーターの軸とホイールが強く接しており、ホイールが回らなくなっている可能性があります。一度モーターホルダーからモーターを取り外し、再度、モーターを挿入してください(図参照)。

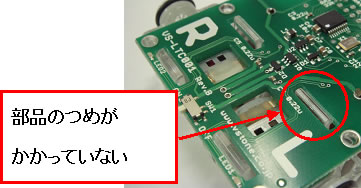
- 03. モーターホルダーが基板に正しく取り付けられていない可能性があります。モーターホルダーのつめが、基板にしっかりかかるように取り付けてください(図参照)。
- 04. モーターの端子がはみ出している可能性があります。基板からモーターホルダーを取り外し、再度、基板に付け直してください(図参照)。

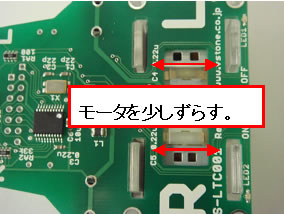
- 05. モータの端子の接触が悪い可能性があります。モーターホルダーを取り外し、モータの端子を少し起こして、再度、基板に付け直してください。また、基板の裏側よりモータを少しずらすことで、接触が改善される場合があります。
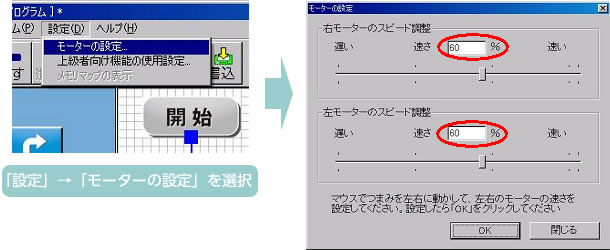
- 06. BeautoBuilder R のモーターのスピード設定の値が低すぎる場合があります。設定値は、40%以上(50%-60%付近 推奨)に設定してください。
- ビュートレーサーはバックさせることは出来ないのですか?
- ロボットの設計上、バックをさせることは出来ません。
接続、通信について
- Windows7~11に対応していますか?
- ビュートレーサーは、Windows2000以上のWindows OSに対応しております。
- MacOSに対応していますか?
- MacOSには対応しておりません。また本バージョンで対応する予定もございません。
- ビュートレーサーをPCのUSBポートに接続しても、Beauto Builder R上で未接続のまま、接続中の表示になりません。
- 01. Beauto Builder Rを最新のバージョンに更新し、ビュートレーサーのファームウェアも更新してください。
 「Beauto Builder R」のダウンロード
「Beauto Builder R」のダウンロード - 02. USB接続を監視する常駐ソフトの影響で、接続ができない場合があります。下記の手順を参照し、常駐ソフトを終了してください。
<Windows 10 の場合>
- 【左下のスタートアイコン上で右クリック】-【検索(S)】をクリックします。
- 検索欄に【msconfig】と入力し、【Enter】キーを押します。
- 【スタートアップ】タブをクリックし、【タスクマネジャーを開く】をクリックします。
- 停止させたいソフト上で右クリックをして、無効化を選択します。
- パソコンを再起動します。
- 【スタート】ボタンをクリックします。
- 【検索の開始】に【msconfig】と入力して【Enter】キーを押します。
- 【システム構成】のウィンドウが表示されます。
- 【スタートアップ】タブをクリックします。
- 停止させたいソフトの【チェックボックス】をクリックして、チェックマークを外して【OK】ボタンをクリックします。
- 【再起動】ボタンをクリックし、パソコンを再起動します。
※NEC「ワンタッチスタートボタン」、ELMO「IMAGE Mate Accent」などが有効の場合、接続がうまくいかないということがありました。また、タスクトレイに常駐しているボイスレコーダーのユーティリティを終了すると改善されたという報告もありました。 - USBケーブルで接続すると、通信が不安定になります。
- USBケーブルの種類や使用頻度によっては、ロボットとの接続部が緩くて通信が不安定になる場合があります。ケーブルの接続部の金具を指で若干内側に折り曲げると、緩み・接触不良が改善する場合があります。詳細な手順は下記資料をご参照ください。
USBケーブルの接触改善方法(PDF)
- 学校のパソコンでソフトウェアがうまく起動しません。
- BeautoBuilderRのフォルダをデスクトップに置いた場合、PCの設定やセキュリティによりソフトウェアが起動出来ない場合があります。フォルダを置く場所をCドライブ内やその他の場所に変更し、再度ソフトウェアを実行してください。
その他
- 上級者コースの回答案をください
- こちらの解答プログラムをダウンロードしてください。
「解答プログラム」のダウンロード - モータホルダが折れてしまいました
- 予備のモータホルダを別途お買い求めください。
ビュートレーサー用モーターカバー - 電池を逆に差し込んだら動かなくなった
- 本体基板の破損については基板交換対応(有償)となります。
問い合わせフォームよりお問い合わせください。 - LED、赤外線センサー、電源スイッチが基板から取れてしまった
- 本体基板の破損については基板交換対応(有償)となります。
問い合わせフォームよりお問い合わせください。 - タイヤのoリングが劣化して使えなくなりました
- 弊社では補修パーツとしてのタイヤの販売は行っておりませんが、互換品をwebショップ等でお買い求めいただくことは可能です。本製品のタイヤは「1種A S-9(1.5(線径)×8.5(内径))」という種類のoリングを使用しております。
- 別売りの赤外線センサや、その他拡張センサの取り付けはどうすれば良いですか?
- こちらの「アナログ入力デバイス追加説明書」をご参照ください。
「アナログ入力デバイス追加説明書」をご参照ください。 - シミュレータが動きません
- 01. お使いのPCのDirectXのバージョンが合わない可能性があります。最新版のDirectXをインストールしてください。
「最新版DirectX」のインストール - 02. お使いのPCで、ディスプレイのデバイスドライバが正しくインストールされておらず、それが原因で異常が発生している可能性があります。特にWindows7において、インストールやアップデートの際に、過去のディスプレイドライバが勝手に変更される(「標準VGAドライバ」などになる)場合がある模様です。お使いのPCのデバイスマネージャなどからこの点をご確認いただき、ディスプレイのデバイスドライバをインストールしなおすなどしてください。
