ヴイストン株式会社

01製品パッケージ
ビュートローバーH8/ARMの本体及びセット商品に付きましてご紹介します。
ビュートローバーARM 通常版

ビュートローバーARMの通常版になります。ロボット本体(キット)、ソフト・資料を収録したCD-ROM、接続ケーブルが含まれます。

ビュートローバーH8 通常版

ビュートローバーH8の通常版になります。ロボット本体(キット)、ソフト・資料を収録したCD-ROM、接続ケーブルが含まれます。
ビュートローバーARM 完成版
ビュートローバーH8の組み立て完成版になります。のロボット本体(組み立て済み)、ソフト・資料を収録したCD-ROM、接続ケーブルが含まれます。
ビュートローバーH8 完成版
ビュートローバーH8の組み立て完成版になります。のロボット本体(組み立て済み)、ソフト・資料を収録したCD-ROM、接続ケーブルが含まれます。
02CPUボード
ビュートローバーH8/ARMに搭載されているCPUボードの単品販売になります。
ARMマイコン搭載学習用CPUボード VS-WRC103LV

ビュートローバーARMに搭載されているCPUボードです。
H8搭載学習用CPUボード VS-WRC003LV

ビュートローバーH8に搭載されているCPUボードです。
03拡張デバイス
ビュートローバーH8/ARM用の拡張デバイスになります。
ビュートローバーH8/ARM用 赤外線センサ(1個)

標準搭載されている赤外線センサです。
2つ以上接続する場合、別売のアナログ入力コネクタ、4つ以上つける場合はVS-WRC004LVが必要になります。
2つ以上接続する場合、別売のアナログ入力コネクタ、4つ以上つける場合はVS-WRC004LVが必要になります。
アナログ入力コネクタ(基板側)

CPUボードのch3,4のアナログ入力を利用するために必要です。
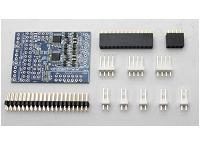
I/O拡張ボード VS-WRC004LV
ビュートローバーH8/ARM用 エンコーダ拡張セット Ver.2

ロボットの速度や動作距離の測定が可能なロータリーエンコーダを拡張できます。
電源電圧の影響を受けず、毎回きめられた距離を進む、同じ角度だけ回転するなどの動作が可能になります。(※取り付けにはVS-WRC004LVが必要です)
取扱説明書はコチラ
電源電圧の影響を受けず、毎回きめられた距離を進む、同じ角度だけ回転するなどの動作が可能になります。(※取り付けにはVS-WRC004LVが必要です)
取扱説明書はコチラ
ビュートシリーズ用 大出力モータアンプボード「VS-WRC006」 Ver.3

540タイプモータ、380タイプモータなど、最大16V・41A(FET 最大値)までの出力の大きなモータを駆動できるようになります。
ビュートローバー用モータ以上に出力の大きいモータを使用する場合は、必ずご利用ください。
ビュートローバー用モータ以上に出力の大きいモータを使用する場合は、必ずご利用ください。
8連赤外線センサボード「VS-IX010」

8 個の赤外線センサを搭載したセンサボードです。
IXBUSに接続するため、アナログ入力ポートをその他のセンサの搭載に振り分けることができます。
ラインを外れにくくなる、直角コーナーの検知しやすくなる、など高度なライントレースが可能になります。
IXBUSに接続するため、アナログ入力ポートをその他のセンサの搭載に振り分けることができます。
ラインを外れにくくなる、直角コーナーの検知しやすくなる、など高度なライントレースが可能になります。
ビュートローバー H8/ARM用 無線操縦セット Ver.2

ロボット専用無線コントローラ「VS-C3」と接続用コネクタのセットです。無線コントローラからの信号を、ビュートビルダー2やC言語で利用してプログラミングすることで、ロボットを無線操縦できるようになります。
VS-C3・VS-BT003 接続フレーム ビュートローバー用

ロボットに無線コントローラ「VS-C3」の受信機を取り付けるコネクタです。ロボットのCN14に接続します。
ロボット専用無線コントローラ「V-コントローラ VS-C3」

コントローラ「VS-C3」と受信モジュール「VS-RCV3」のセットです。
03補修・拡張パーツ
ケーブル類
センサ・モータ・電源などの拡張用ケーブルです。
アナログ入力デバイス用コネクタケーブル(5本入)

アナログ入力デバイスを接続するための接続用コネクタです。
○配線(ピン)仕様
オレンジ(P1):3.3V
緑(P2):GND(直列に100Ω)
青(P3):GND
白(P4):センサ入力(33kΩプルアップ)
○配線(ピン)仕様
オレンジ(P1):3.3V
緑(P2):GND(直列に100Ω)
青(P3):GND
白(P4):センサ入力(33kΩプルアップ)
デジタル入力デバイス用コネクタケーブル(5本入)

スイッチ、押しボタンなどデジタル入力デバイスを接続するための接続用コネクタです。
○配線(ピン)仕様
青(P3):GND
白(P4):センサ入力(33kΩプルアップ)
○配線(ピン)仕様
青(P3):GND
白(P4):センサ入力(33kΩプルアップ)
電源コネクタケーブル

付属している電池ボックス以外の電源を、接続する際にご使用ください。
DCモータコネクタケーブル(5本入)
付属モータ以外のモータを接続する際にご使用ください。
フレーム・パーツ
ビュートローバー H8/ARM用 キャスター

ビュートローバーH8/ARM用 タイヤセット

ビュートローバーH8/ARM用 メインフレーム

ビュートローバーH8/ARM用 電池ボックス

ビュートローバーH8/ARM用 補修モータ

