ヴイストン株式会社

本製品は生産・販売終了しました。現在は後継商品のVS-BT003を販売しております。
01Bluetooth通信モジュール「VS-BT001」
 Bluetoothシリアル通信モジュール「VS-BT001」は、Bluetooth(R)プロファイルのSPP に対応した通信モジュールです。
Bluetoothシリアル通信モジュール「VS-BT001」は、Bluetooth(R)プロファイルのSPP に対応した通信モジュールです。
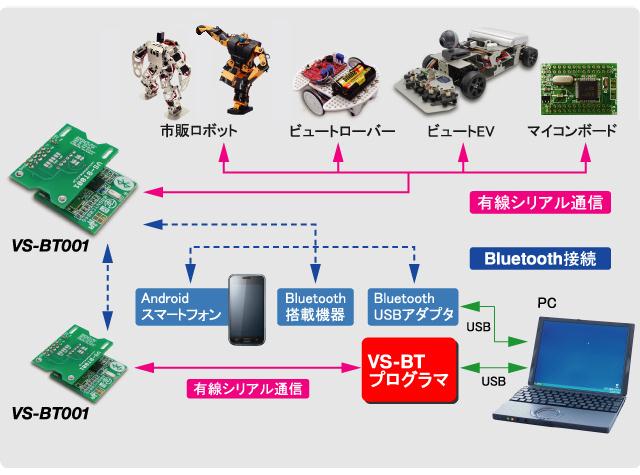
弊社製二足歩行ロボットや教材ロボット「BeautoRoverH8/ARM」など、UART 機器に対して無線で接続し、双方向通信をするアプリケーションを簡単に作成することができます。
ロボット本体に本製品を搭載することで、Android スマートフォンからの無線操縦や、PC からのリモートブレインが簡単に可能となります。
※JO-ZERO(有限会社姫路ソフトワークス)、ROBO XERO(株式会社デアゴスティーニ・ジャパン)は非対応となりましたのでご了承ください。
接続可能な機器
02概要説明
VS-BT001の特徴は以下の通りです。
国内の電波法認証を取得

![]() VS-BT001は、日本国内での電波法に基づく技術基準適合証明(技適)やBluetooth(R)SIGの認証を取得しているため、ご使用いただく際に認証など取得せずに使用したり、製品に組み込むことが可能です(※VS-BT001に搭載されているBluetoothモジュールに対して、改造、設定の変更を除く仕様変更等を行った場合、認証の対象外となります)。
VS-BT001は、日本国内での電波法に基づく技術基準適合証明(技適)やBluetooth(R)SIGの認証を取得しているため、ご使用いただく際に認証など取得せずに使用したり、製品に組み込むことが可能です(※VS-BT001に搭載されているBluetoothモジュールに対して、改造、設定の変更を除く仕様変更等を行った場合、認証の対象外となります)。
外部パソコンからのロボット制御、データ表示ソフトも公開
 VS-BT001は、Bluetooth(R)プロファイルのSPPに対応しており、RFCOMMにより外部PCの仮想COMポートとして通信が出来ます。COMポートにアクセスすることで、無線でUART機器と通信可能ですので、無線で双方向通信をするアプリケーションを簡単に作成することができます。
VS-BT001は、Bluetooth(R)プロファイルのSPPに対応しており、RFCOMMにより外部PCの仮想COMポートとして通信が出来ます。COMポートにアクセスすることで、無線でUART機器と通信可能ですので、無線で双方向通信をするアプリケーションを簡単に作成することができます。
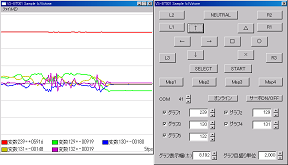
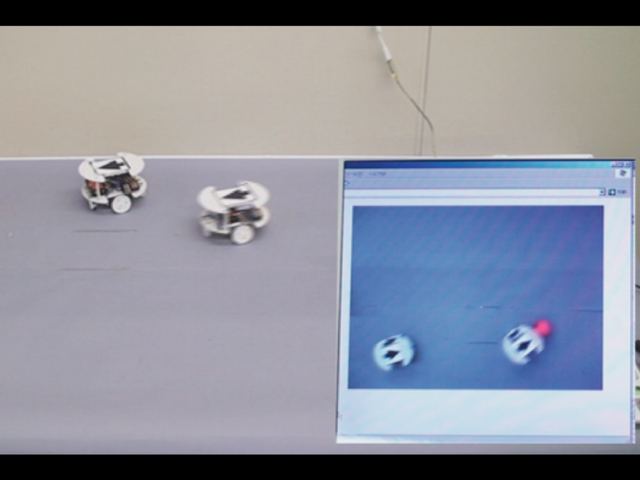
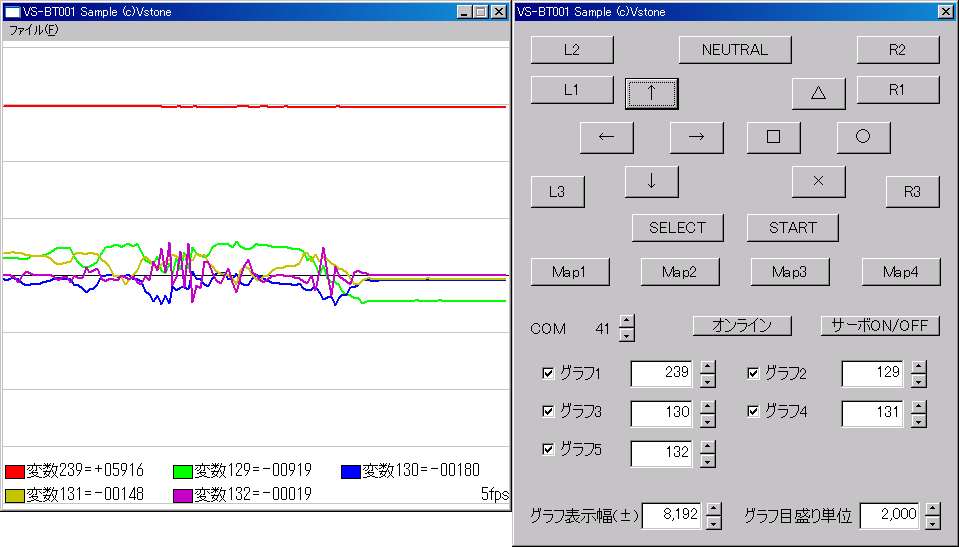
PCとロボットが無線通信するソフトウェアのサンプルソースや、二足歩行ロボット用のパラメータをグラフ表示するソフトをダウンロードページにて公開します。PCに接続されたカメラでの処理結果をもとにロボットを移動させる、無線でリアルタイムにロボットの状態を取得するなどが可能になります。
また、VS-BT001の通信速度やペアリング関連などの様々な詳細設定は、USB接続の「VS-BTプログラマ」を用いてPCから変更可能です。設定はすべて本体に保存されるため、用途に応じて設定を行った後、様々な機器に組み込んで使用することが出来ます。
Android携帯から操縦、音声による操縦も可能
 二足歩行ロボットにVS-BT001を接続し、Android携帯にAndroidマーケットで公開している、「VS-C2 for Android」をインストールすれば、ロボットをゲームパッドと同様に無線操縦することができます。また、音声認識によって動作させることも可能です(「VS-C2 for Android」へのリンクはダウンロードページを参照)。
二足歩行ロボットにVS-BT001を接続し、Android携帯にAndroidマーケットで公開している、「VS-C2 for Android」をインストールすれば、ロボットをゲームパッドと同様に無線操縦することができます。また、音声認識によって動作させることも可能です(「VS-C2 for Android」へのリンクはダウンロードページを参照)。
また、Android携帯と二足歩行ロボットと通信するサンプルソースも公開します。Androidはオープンなプラットフォームのため、オリジナルのロボット制御アプリケーションも作成可能です。サンプルを用いてカメラ、スピーカ、マイク、3G回線やWifiネットワーク、加速度センサなどを利用したロボットを制御するアプリケーションを作成することができるなど、スマートフォンとの連携によりロボットの可能性は格段に広がります。
レベルコンバータを内蔵し、ROBONOVA-I、MANOIにも対応
 シリアル信号のレベルコンバータを内蔵しているため、3.3V 系、5V 系のマイコンボード、ロボット用コントロールボードにてご使用いただけます。
シリアル信号のレベルコンバータを内蔵しているため、3.3V 系、5V 系のマイコンボード、ロボット用コントロールボードにてご使用いただけます。
そのため、弊社ロボット以外にも、株式会社ハイテックマルチプレックスジャパン「ROBONOVA-I 」、株式会社MANOI企画「MANOI」シリーズにおいてもご使用いただくことが可能ですので、様々なロボットをBluetooth で無線化することが出来ます。(一部ロボットには別途「VS-BT002」が必要です。)
複数台との同時通信も可能。カメラを使ったリモートブレインなどの教材にも最適
 PCのUSB-Bluetoothアダプタ1つに対し、複数のVS-BT001を接続できますので、複数台のロボットを同時に制御することができます。
PCのUSB-Bluetoothアダプタ1つに対し、複数のVS-BT001を接続できますので、複数台のロボットを同時に制御することができます。
二足歩行ロボット、ビュートローバーなどの教材を複数台同時に1つのPCで制御できるので、RoboCup 小型リーグなどの競技や、学校での高度なプログラミング教材としてもご使用いただけます。
03VS-BTプログラマ
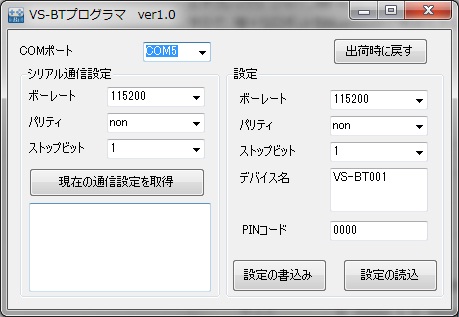
VS-BTプログラマは、VS-BT001内部に保存されている設定を変更するための接続モジュールです。本製品は、VS-BT001のPINコード、Bluetoothデバイス名、ボーレートなどを変更することができます。製品は、接続用の基板・ケーブルのセットになります。
VS-BTプログラマを用いて各種設定を行う専用ソフトをダウンロードページで配布しています。VS-BTプログラマをお求めの方はこのソフトをご利用ください。
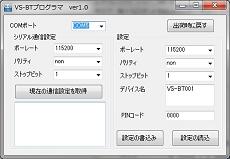

ビュートローバーH8、及び株式会社MANOI企画のMANOIシリーズは、対応するシリアル通信のボーレートがVS-BT001の出荷状態と異なるため、VS-BTプログラマでボーレートの変更を行う必要があります。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}