ヴイストン株式会社

本製品は生産・販売終了しました。系列商品「ビュートローバーARM」はこちらになります。
01ダウンロード情報
ダウンロードリスト
02ビュートミニARM組み立てマニュアル
ビュートミニARMの組み立てマニュアルは下記よりダウンロードできます。
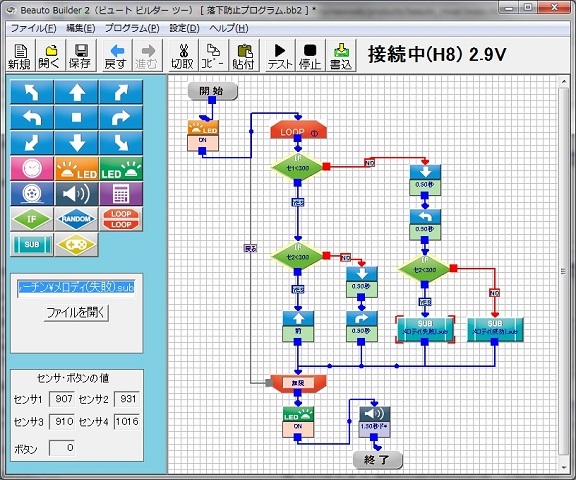
03プログラミングソフトウェア「ビュートビルダー2」
ビュートビルダー2は、ビュートミニARMをPCと接続してプログラミングを行なうためのソフトウェアです。現在の最新版は以下よりダウンロードできます。
ロボットに、C言語などで作成したプログラムを書き込んだ場合、そのままではビュートビルダー2は使用できません。必ずビュートビルダー2用のファームウェアを、ロボットに書き直してからお使いください。
■更新履歴
Release8(2012/10/17):一度シリアル通信した後にH8でのHID接続ができないバグを修正
Zip圧縮バージョンは、学校などでソフトウェアがインストールできないなど、PCに制限がかかっている場合に使用するものです。通常はインストーラバージョンをご使用ください。
05ファームウェア
ビュートミニARMをビュートビルダー2に対応したプログラムに書き換えるためのファームウェアは下記よりダウンロードできます。
ファームウェアのアップデートについては、BeautoBuilder2取扱説明書(PDF)の「ファームウェアのアップデート」を参照してください。
■更新履歴
バージョン6.0(2013/12/18): ch3モータの動作に関する不具合を修正(ビュートローバー向け)
バージョン5.0(2012/4/11): ビュートミニARM用ファームウェア初版
バージョン4.0(2011/4/8): Bluetooth通信デバイス「VS-BT001」に対応
バージョン3.0(2011/1/21): エンコーダが動作しない不具合を修正
バージョン2.0(2011/1/13): VS-C1が動作しない不具合を修正
バージョン1.0(2010/12/10): 初版
06参考資料
製品の参考資料は、下記をご参照ください。
VS-WRC104取扱説明書
VS-WRC104取扱説明書は、ビュートミニARMの本体基板に関する説明書です。本体に備わった入出力ポートの概要や、C言語開発環境「LPCXpresso」の導入方法などについては、こちらの資料をご参照ください。
C言語環境「LPCXpresso」のダウンロードは、NXPセミコンダクターズ社ダウンロードページより行います。
ビュートミニARM用オプション製品説明書
ビュートミニARMのオプション製品の各種説明書です。オプションをご購入の際の参考にしてください。
プログラミング学習用参考資料
ビュートミニARMを用いたプログラミングの授業や自主学習に使える資料です。
07C言語サンプルソース
ビュートミニARMのC言語サンプルソースです。サンプルソースのビルドやロボット本体へのプログラム書き込みについては「VS-WRC104取扱説明書」をご参照ください。
「VS-WRC104取扱説明書」の手順でLPCXPressoにプロジェクトをインポートできない場合、こちらの操作をお試しください。
- 「LEDの点滅」サンプル
- 「モータ駆動 」サンプル
- 「IXBUS(アナログ入力)接続」サンプル
- 「エンコーダ拡張セットによるモータ制御」 サンプル
- 資料「VS-WRC103LV・VS-WRC104シリアル通信サンプルについて」(PDF)
- 「PCとのシリアル通信」サンプル
- VS-WRC103LVシリアルドライバインストーラ
- 「IXポート(SCI)シリアル通信サンプル」サンプル
基本的な操作を学ぶためのサンプルです。実行するとLEDが交互に点滅します。
モータ制御関数の使い方のサンプルです。
IXBUSにジャイロ・加速度センサボード、アナログ入力拡張ボードなどを接続したときのデータの取得方法について解説したサンプルです。
ビュートミニARMでエンコーダ拡張セットを用いて、距離を計測して走行するサンプルソースです。
「PCとのシリアル通信」サンプル
このサンプルはUSBケーブルでPCと接続した際に、COMポート(シリアルポート)を利用してPCと通信するためのサンプルです。シリアル通信を利用することで、ハイパーターミナルなどターミナルソフトを利用して、簡単にCPUボードとの通信が可能になります。
このサンプルを使ってボードを接続する際は、専用のドライバ「VS-WRC103LVシリアルドライバインストーラ」を、必ず接続前にインストールしてください。詳細は「VS-WRC103LV・VS-WRC104シリアル通信サンプルについて」をご覧ください。
「BluetoothモジュールVS-BT001などとのシリアル通信」サンプル
このサンプルは、VS-WRC104(ビュートミニARM)のIXポートに Bluetoothシリアル通信モジュール「VS-BT001」、VS-IX003、VS-RC003などシリアル通信機能を搭載した機器を接続して、シリアル通信を用いて無線でPCなどの機器と通信をするサンプルです。
VS-WRC104(ビュートミニARM)のIXポート内のTX,RXポートに、VS-BT001を接続してシリアル通信を行うサンプルです。
07Android携帯用ロボット操縦ソフト「VS-C2 for Android」

VS-C2 for Androidは、Android携帯をVS-BT001を拡張したロボット本体に接続して操作することができるソフトウェアです。スマートフォンのタッチパネル・加速度センサ・音声認識などからロボットを操作できます。
本ソフトウェアは、Android Marketよりダウンロードできます。以下のリンクよりダウンロードページへお入りください。

{kind=link}