ヴイストン株式会社

01ダウンロード情報
ダウンロードリスト
02取扱説明書
ナノローバーの取扱説明書です。専用ソフト「nanoRoverMath」の操作方法についても記述しています。
- ナノローバー 取扱説明書(PDF:1.4MB)
03専用ソフトウェア「nanoRoverMath」
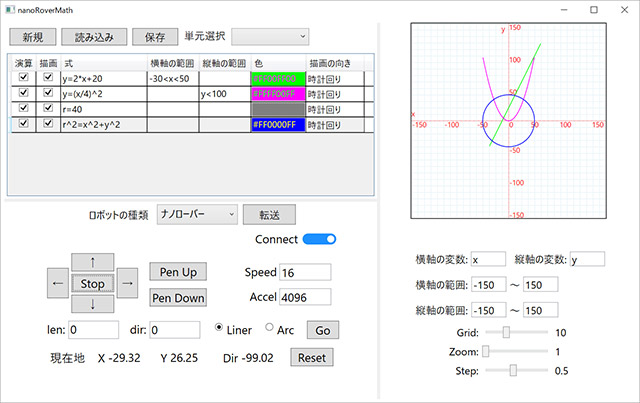
数式を入力して画面にグラフを描画し、そのグラフの走行データをナノローバーに転送して描画させることができるソフトウェアです。数学の学習において抽象的な数式の概念をロボットに目に見える形で描画させることで、理解度と学習意欲の向上等が期待できます。
既発売の弊社製品アカデミックスカラロボットにも対応しており、数式によって指定した軌跡に沿ってアームを動かすことも可能です。
| 対応環境 | Windows 7/8/8.1/10/11(.Net Framework 4.5.2以上) |
|---|---|
| ファイル | 最新版のnanoRoverMathをダウンロード(zip形式:250KB) 最新版のnanoRoverMath(インストーラ形式)をダウンロード(exe形式:480KB) |
| 説明書 | nanoRoverMathの説明は、ナノローバー取扱説明書をご参照ください。 |
| 公開日 | 2019/10/21 |
| バージョン | バージョン1,0,0,3 |
| 追加/変更点 | 初版 |
| 主な更新履歴 | バージョン1,0,0,3 ・一部のPCで通信処理が正常に動作しない問題を修正 バージョン1,0,0,2 ・陰関数のグラフで一部が欠ける問題の修正、鋭角な線の描画時に走行が破綻する問題の改善 バージョン1,0,0,1 ・初版 |
USBシリアルドライバー
nanoRoverMathでロボットと通信する場合は、以下のURLよりUSBシリアルドライバーをダウンロードしてPCにインストールする必要があります。
下記リンク先より「Operating System」が「Windows」の行内を確認し、「Comments」内の「Available as a setup executable」をクリックしてダウンロードしてください。詳しいインストール手順等は取扱説明書も併せてご参照ください。
04サンプルプログラム
サンプルプログラム
Arduino IDEでプログラミングする際のライブラリ・サンプルソースです。サンプルソースは弊社のgithubにて公開しております。nanoRoverMath用のプログラム(バイナリ)とその本体への書き込み方法もこちらのリポジトリに含まれています。
- ナノローバー サンプルプログラムリポジトリ(githubのページへ)
下記のサンプルが含まれます。 - nanorover_common:ナノローバーを無線通信またはROSで操作する際に使用する
- nanorover_run:ナノローバーを走行させる
- nanorover_penUpDown:ペンアップダウン機能を使用する
- nanorover_encoder:エンコーダを使用して走行させる
- nanorover_LED:LEDを点灯させる
Wi-Fi/Bluetooth通信制御プログラム
Wi-Fi通信・Bluetooth通信のサンプルを実行したナノローバー本体を、WindowsPCから制御するサンプルアプリです。実行には.Net Framework4.5.2以上が必要です。
05参考資料
nanoRoverMathなどで利用可能なグラフ用紙の元データです。それぞれのサイズの用紙に印刷すると、幅5mmの罫線のグラフ用紙を作成できます。
