ヴイストン株式会社
本製品は生産・販売終了しました。後継機種「ビュートバランサー2」はこちらになります。
01「Beauto Balancer」仕様紹介
Beauto Balancerの詳細スペックは以下の通りです。
Beauto Balancer仕様一覧
| 外形 | 110(H)×45(W)×210(D)mm |  |
|---|---|---|
| 重量 | 約175g(バッテリ搭載時) | |
| モータ構成 | DCモータ1個搭載(本体駆動用) | |
| 搭載センサ | ジャイロセンサ×1 エンコーダ×1 | |
| CPUボード仕様 | VS-WRC003 DCモータ最大2ch制御可能、アナログ入力4ch取得可能 LED×2搭載、圧電ブザー搭載 基板単体でのプログラミング可能、USB接続、H8/36064G搭載 | |
| 制御方法 | ・ゲイン調整用ソフトウェア「Balancerプログラマ」 ・倒立振子制御部を含むサンプルプログラムを公開 ・C言語開発環境「HEW」「FDT」を利用可能 | |
| 電源 | 単3アルカリ乾電池 4本(別売) 、USBバスパワー(モータなど一部機能を除く) | |
| 対応OS | Windows XP/Vista/7(日本語版) | |
| インタフェース | USB | |
| 販売価格(税抜) | 9,500円 | |
※製品の仕様は予告無く変更する場合がございますのでご了承ください
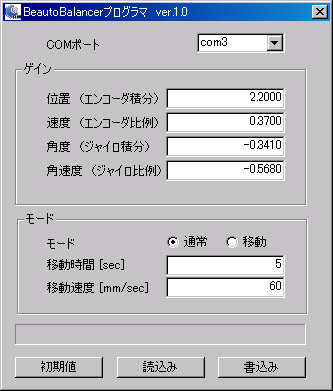
02制御ソフトウェア「Balancerプログラマ」紹介
Beauto Balancerを簡単に動作させるソフトウェアとしまして、「Balancerプログラマ」をご利用いただけます。Balancerプログラマは、ジャイロセンサのゲインやロボットの姿勢保持・移動などの設定を簡単に行なうプログラムで、これを利用して倒立振子の概念を理解したり、簡単な実験・学習をすぐに行なうことができます。
動作環境
| OS | Windows2000/XP/Vista |
|---|---|
| CPU | Pentium-Ⅲ以降(1GHz 以上推奨) |
| RAM | 128MB |
| インターフェース | USB |
03Beauto Balancer搭載CPUボード「VS-WRC003」仕様紹介
Beauto Balancerに搭載されているCPUボード「VS-WRC003」は、センサ・スイッチ類の増設、サーボモータの接続、ゲームパッドコネクタの拡張・接続など高度な拡張が可能なマイコンボードです。詳細を以下に紹介します。
VS-WRC003は、ピンヘッダ追加でI/O増設などH8/Tinyの機能をフルに活用。拡張センサ類など豊富なオプションも取り揃えており、電子工作のコア部分としてもその実力を発揮します。別売のゲームパッド接続コネクタを使用して弊社製VS-C1などのゲームパッドを接続することもできます。
VS-WRC003 仕様

| 寸法 | 51x47x12mm |
|---|---|
| 重量 | 13g |
| CPU | H8/36064G |
| DCモータ出力 | 2ch |
| LED | 2個 |
| インターフェース | USB |
| アナログ入力 | 4ch |
| ブザー | 単音出力搭載(音階・音量可変) |
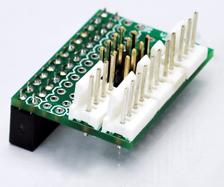
04VS-WRC003用I/O拡張ボード「VS-WRC004」 紹介
VS-WRC004は、VS-WRC003に接続するI/O拡張ボードです。モータ出力2ch・アナログ入力2ch・PWM(弊社VS-S092Jなどのサーボモータ用)出力4chを備えており、VS-WRC003本体とあわせて、モータ出力4ch(DCモータ・PWM出力の合計)・アナログ入力6chまでI/Oを使用できます。また、別系統からの電源入力やアナログ入力のプルアップ解除も可能です(要パターンカット)。
VS-WRC004 仕様
| 寸法 | 24(W)x33(D)mm |
|---|---|
| 重量 | 2g |
| モータ出力 | DCモータ×2、PWM×4 (VS-WRC003のモータ出力と合わせて、DCモータとPWMを合計で最大4chまで使用可能) |
| センサ入力 | アナログ入力×2 |
| 付属物 | コネクタ類 (アナログ入力用2、DCモータ出力用2、電源用1) ピンヘッダ(メス2×13、オス2×20各1) |
| その他 | 別電源入力可能、プルアップ解除可能 (要パターンカット加工) コネクタ、ピンヘッダは要半田付け |
| 価格 | 1,900円(税抜) |
部品一覧・VS-WRC003への取り付け
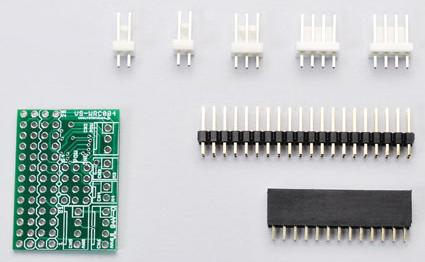

本製品は、基板本体にピンヘッダ、コネクタが実装されておりません。お客様の用途に応じて別途半田付けしていただく形になります。VS-WRC003に搭載する場合は、VS-WRC003側にピンヘッダをはんだ付けし、そこにVS-WRC004を接続します。
