年度内(2026年3月中)納品可能です
【ピッコロボIoT で できること】
- ロボットや構成部品の学習ができる
ロボットを組み立てる中で、部品の構成や配置などが学習できるため、設計や構造を理解することに役立ちます。
- Arduinoの基礎が学習できる
ピッコロボIoTでは、電子工作の基板として定着しているArduino(アルディーノ)を採用しています。ロボットのプログラミングを基礎から学ぶことができます。
- IoTにチャレンジできる
ピッコロボIoTにはWi-Fi機能が搭載されているため、ネットワークを利用したプログラムや動作を作ることができます。いま注目されている「IoT(Internet of Things、モノのインターネット)」の入門教材に適しています。
Wi-Fi通信対応のArduino互換新ボードを搭載
ピッコロボIoTは、好評をいただいた初心者学習向けArduino互換ボード搭載2足歩行ロボット「ピッコロボ」の後継機です。
新しい制御ボードとして、Wi-Fi通信やサーボモーター出力などのI/Oが強化された新ボード「V-duino」を搭載しています。V-duinoはArduino互換のESP-WROOM-02をCPUとし、
さらにARMマイコンを搭載することにより、一枚でサーボモーター制御、センシング、ワイヤレス通信を安定して行うことができます。
Arduino互換ロボットコントロールボード V-duinoを搭載
【主な仕様】
- Arduino IDE対応
- サーボモーターの補間機能
- LED制御
- アナログセンサー読込(ADC)
- 超音波センサー読込(HC-SR04)
- Wi-Fi接続
Arduino IDEでプログラム可能
CPUボード「V-duino」はESP-WROOM-02をCPUに使用しており、ピッコロボと同じくArduino IDEでの
プログラミングが可能となっています。また、豊富なライブラリやサンプルプログラムを用意しており、
初学者でも無理なくロボットプログラミングを学習することができます。
Wi-Fiでスマートフォンやクラウドと接続可能
Wi-Fi経由で、スマートフォンやクラウドサービスと通信可能です。サンプルのプログラムを使えば、
スマートフォンのブラウザからピッコロボIoTを簡単に操作できます。
サーボモータ制御用ARMチップ搭載
CPUボード「V-duino」には複数のサーボモーターやセンサーを制御するために、専用ソフトを書きこんだARMチップを搭載しています。
このARMチップはサーボモーター、センサーの仮想的なドライバーチップとして動作します。
ユーザーはArduino IDEのプログラム内にARMチップの機能を呼び出す関数を書くだけで簡単にサーボの補間移動などの高度な機能を呼び出すことができます。
モーター制御、センシング、ネットワーク通信を1つのボードで実現
サーボモーター、センシング、ネットワーク通信機能を1枚のボードに搭載しているため、IoTデバイスやワイヤレス操作のロボット等様々な用途に拡張可能です。
また、サイズも小型のため、オリジナルロボットへの組み換えなども容易です。
ピッコロボIoT用 サンプルコース
ピッコロボIoTでお使いいただけるサンプルコースを公開しております。
スマートフォンやタブレットからの操縦時に、練習やタイムトライアルの基準としてお使いください。
また、コースをクリアするための歩行プログラムを作成するといった用途でもご活用いただけます。
コースは、簡単なU字形状の「初級用」と、より複雑な形の「上級用」の2種類です。
全体の大きさはA2紙サイズとなっています。A2紙への印刷、あるいはA4紙を4枚つなげて作成してください。
印刷用PDFデータでは、A4紙への印刷ができる分割済みファイルも用意しております。
プログラムランド ROBOPROバージョンを公開
ブラウザ上でプログラミング学習できるScratch風のブロックプログラミングツール「プログラムランド」のピッコロボIoT版を試験公開しました。
従来のプログラムランドは画面上のシミュレータで実行結果を確認する形式ですが、プログラムランド ROBOPROバージョンでは、実際にネットワークを通じてロボット本体を動かすことが可能です。ブラウザで学習可能なので、スマートフォンやタブレット等幅広い動作環境でロボット実機のプログラミングが可能です。
プログラムランド ROBOPROバージョンを使う場合は、ピッコロボIoT本体が必要になります。また、以下に公開している説明書を参考に、本体内のプログラムを書き換える必要があります。
※従来のプログラムランドと「プログラムランド ROBOPROバージョン」は別のプログラムです。
従来のプログラムランドでピッコロボIoTを動かすことはできません。また、両者のプログラムに互換性はありません。
現在最新のブラウザでは正常に通信が出来ない事を確認しており、改善に時間がかかる見込みです。
ご不便をお掛けし申し訳ございません。
プログラムランド ROBOPROバージョン をご利用の際は、下記手順で古いバージョンのchroniumブラウザをご利用いただく事で通信が可能です。
- ①下記URLで公開されている2019年5月のバージョンの、「chrome-win.zip」をダウンロード
ダウンロードサイトはこちら
- ②ダウンロードしたファイルを解凍して、解凍したファイル内の「chrome.exe」を実行します。
- ③ブラウザが起動したら、http://www.vstone.co.jp/programland/piccoroboIoT/ にアクセスしてプログラムランド ROBOPROバージョンをご利用ください。
※「https」では無く「http」です。
PC内のchromeブラウザとは全く別でご利用いただけます。
ピッコロボIoTとGoogle Nest Miniで、家庭内IoTロボットに挑戦!
Wi-Fiネットワークに対応したピッコロボIoTと、Google社から発売されている「Nest Mini(旧名:Google Home mini)」とを用いて、家庭内でIoTロボットを実現する作例を追加しました。
ロボットショップのブログにて、「Nest MiniでLocal Home SDKを使ってお家のIoTロボットを操作する」というタイトルで連載していますので、ぜひチャレンジしてみてください。思いのほか、内容はガチです!
V-duinoを組み込んだ作例を公開
V-duinoを搭載したロボットの作例も製品ページで公開しています。ピッコロボIoTでロボット制御に慣れた後は、
これらの作例をベースにオリジナルのロボットを作ることもでき、ロボット製作の初級から中級へのステップアップにご利用いただけます。
V-duinoを用いた作例の製作に関連するデータ一式です。パーツリスト・簡易組み立て説明・図面データ(*.step等)等が含まれています。作例の制作方法やプログラム・動作等に関するご質問はサポート対象外ですので、ご了承ください。
Vstone公式YouTubeチャンネル
YouTubeチャンネルにて、弊社製品を題材とした解説動画や活用動画などを配信しております。
毎週配信を目標に取り組んでおりますので、動画をお楽しみ頂けましたらチャンネル登録・高評価をお願いします!!
Vstoneチャンネルはこちら
製品仕様
| サイズ | 212(H)×133(W)×92(D) [mm] |
|---|
| 重量 | 約480g(バッテリー搭載時) |
|---|
| 自由度 | 合計4自由度(頭1、腰1、脚2) |
|---|
| サーボモーター | 標準サーボモーター Type2×4 |
|---|
| 本体材料 | MDF |
|---|
| 動作電圧 | サーボモーター 5V, ロジック 3.3V |
|---|
| 電源 | 5V ACアダプタ、または、単3ニッケル水素充電池×4本(別売) |
|---|
| 対応OS | Windows, MacOS X, Linux(Arduino IDE対応環境必須) |
|---|
| CPUボード | V-duino |
|---|
| インターフェース | サーボ×10、センサー×3、超音波センサー×1、
I2C×1、UART×1、USB ×1、圧電ブザー×1(UARTとUSBはバスを共用) |
|---|
| その他 | ソフトスイッチ、バッテリー電圧監視機能、サーボ補間機能
Arduino IDEでプログラム可能 |
|---|
※製品仕様は今後予告なく変更される場合があります。
※ニッケル水素充電池以外の電池を使用されると基板が破損する恐れがあります。アルカリ電池やマンガン電池は使用しないでください。
搭載CPUボード「V-duino」は、こちらで基板単体でも販売しております。
各種ダウンロード
ピッコロボIoT本体、および搭載する制御ボード「V-duino(VS-RC202)」に関連する取扱説明書などは、下記よりダウンロードいただけます。
ピッコロボIoT
V-duino
カタログ
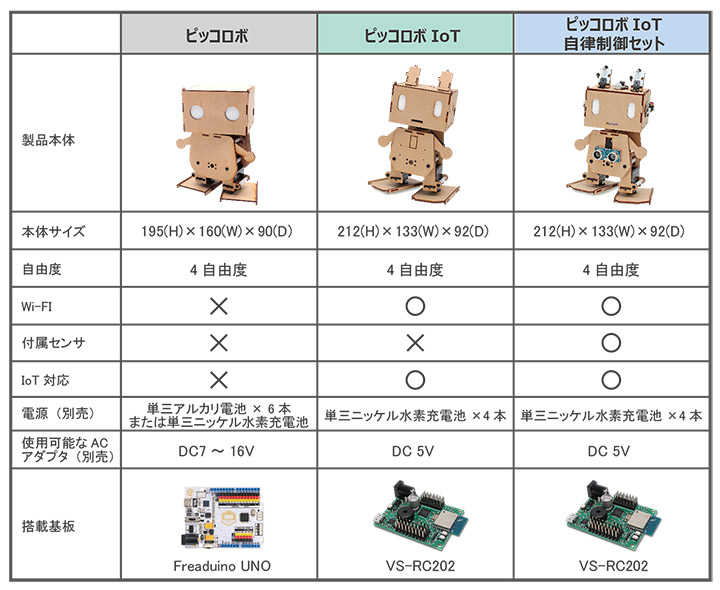
ピッコロボの違いが分かる比較表
※ご購入の際はお間違いのないよう、ご注意ください。
よくあるご質問(FAQ)
- 意図したサーボモーターと異なるサーボモーターが動きます
- サーボモーターの接続が間違っている可能性があります。直ちに電源を OFF にして、サーボモーターのコネクターの接続を見直してください。
- サーボモーターから異音がします
- サーボモーターがロックしているなど、大きな負荷がかかっている場合があります。即座に電源を OFF にして足同士がぶつかっていないかなどをチェックしてオフセット設定を見直してください。
- 急に電源が落ちてしまいます
- 電源電圧が一定以下に落ちると過放電防止のため自動で電源が OFF になります。その他、大量のサーボモーターを接続した場合や、サーボモーターのロックにより電気的な負荷がかかって電源が落ちる可能性もあります。
- ロボットの反応が遅く感じます
- ブラウザからロボットを操作する場合、電波状況や通信距離、遮蔽物等により遅延が発生する場合があります。
- ピッコロボIoTの電源をONにすると、足同士がぶつかったり、腰が大きく曲がってリンクが端にぶつかります
- サーボホーンの取り付けが大きくずれています。直ちに電源を OFF にして、サーボホーンを取り付けなおしてください。
- 歩行をさせると部品同士がぶつかります
- 組み立て時のネジ止めが十分に締まっていない可能性があります。特に組立図「01」「13」「17」はしっかりネジ止めしないと脚のリンクと首のブリッジのネジが干渉する場合があります。
- オフセット調整をして歩行自体はできますが、足同士がぶつかります
- 足を上げるモーション、もしくは、片足を前か後に出すモーションを小さく調整してみてください。これらのモーションが大きい程、足同士はぶつかりやすくなります。
- 片足だけが反対の足と比べて上がりにくくなっています
- 電池ボックスの位置が偏っていると、左右の重さのバランスが崩れ「片方の足はよく上がるが、もう片方はすり足のようになってしまう」ことがあります。電池ボックスの両サイドをケーブルで挟んで、出来るだけ顔の中央部分に来るように調整してください。
- Arduino IDEでサンプルスケッチを書き込むとエラーが出ます
- USBケーブルの接続、COMポートの選択、ボードの選択が正しくできているか確認してください。
上記の設定が正しい場合でも解決しない場合は、V-duino チュートリアルのP14, P15の設定を確認してください。
- Arduino IDE で Generic ESP8266 Module が表示されません
- V-duino 取扱説明書の P16 の手順に従って ESP8266 の設定ファイルをインストールして下さい。
- Arduino IDE で ESP8266 Sketch Data Uploadが表示されません
- V-duino 取扱説明書の P18 の手順に従ってESP8266FSプラグインをインストールして下さい。
- サンプルのHTML_Controllerで、シリアルモニターにIPアドレスが表示されません
- スケッチに Wi-Fi ルータの SSID とパスワードが正しく設定されていない可能性があります。
- シリアルモニターに表示されたIPアドレスを入力したのに、ブラウザに操作用のページが表示できません
- ブラウザの URL 欄に記述された IPアドレスが間違っていないかご確認ください。
※ブラウザによっては、最初に「http://」と記述する必要がある場合があります。
- SSID、パスワードに間違いがないのに、Wi-FiルータからIPアドレスが取得できません
- 多人数でルーターを使用している場合は、ルータに繋がりにくくなることがあります。また、5Ghzの帯域は使用できません。
- 家から持ち出して別の場所で使用したらWi-Fiに繋がらなくなりました
- 出先で使用するWi-FiルータのSSID、パスワードを再度設定してください。