ヴイストン株式会社
Vstone公式Youtubeチャンネル
YouTubeチャンネルにて、弊社製品を題材とした解説動画や活用動画などを配信しております。
毎週配信を目標に取り組んでおりますので、動画をお楽しみ頂けましたらチャンネル登録・高評価をお願いします!!
01台車ロボットへの搭載に適したROS対応ロボットアーム
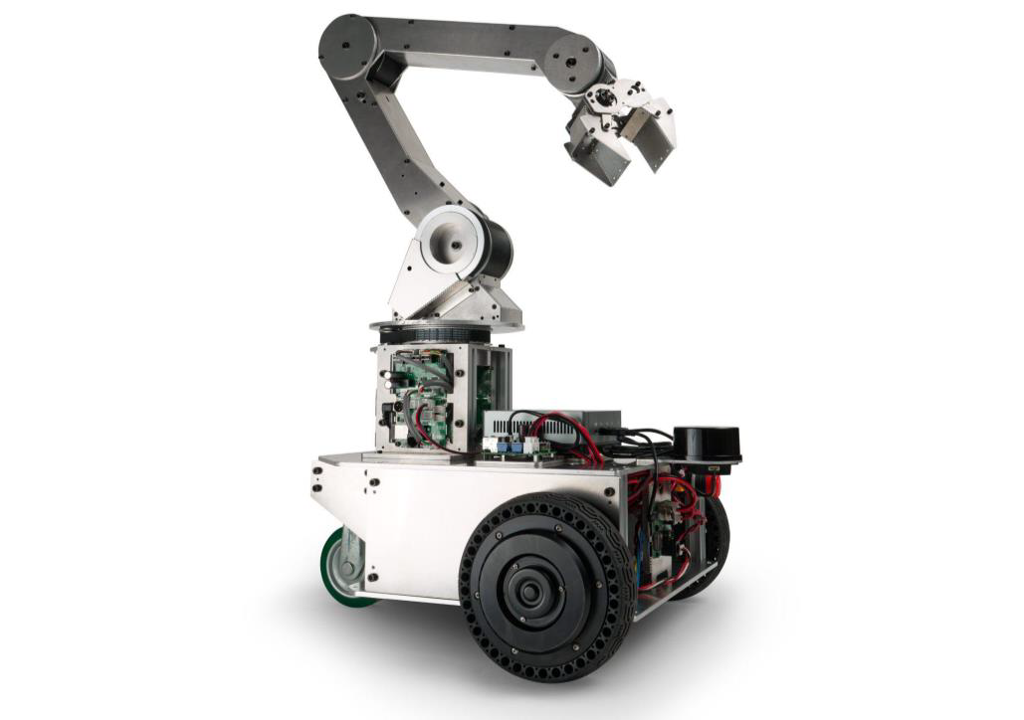
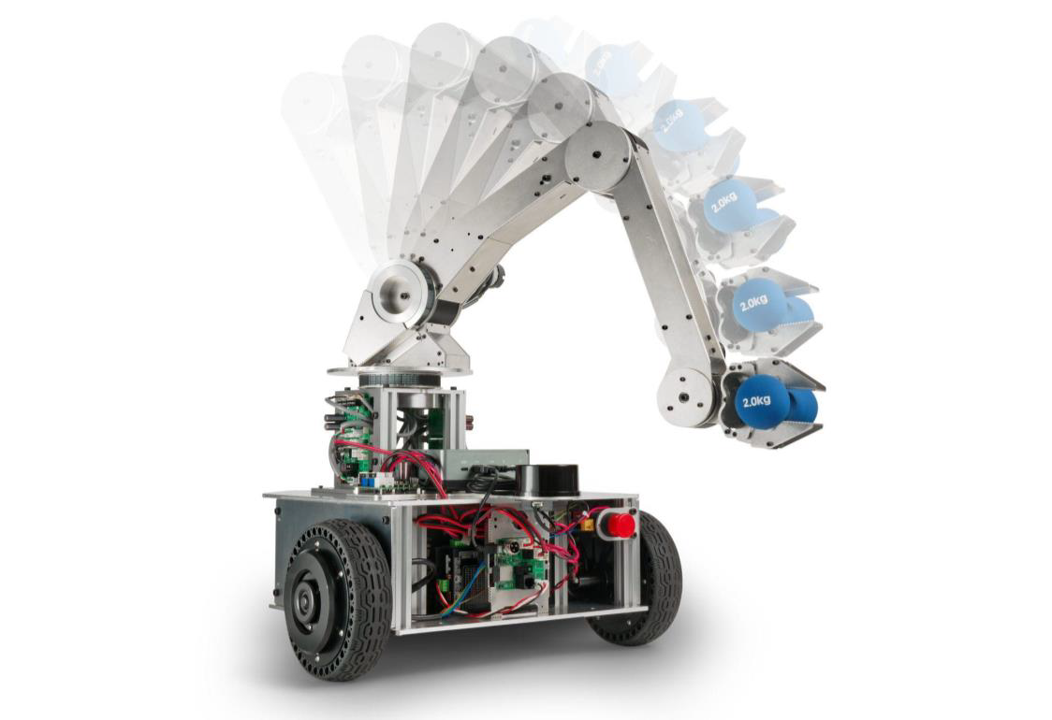
台車用ロボットアーム AMIR 740
(別売の研究開発用台車ロボット「メガローバーF120A」への搭載例)
台車用ロボットアーム「AMIR 740(アミル ななひゃくよんじゅう)」は、弊社製の研究開発用台車ロボットへの搭載に適した、研究開発用途のためのロボットアームです。アームの可搬重量は2kgを実現し、最大で90mmの幅まで開くグリッパーを活用することにより、ロボット開発の可能性を大きく拡張します。
ヴイストン株式会社では本製品の発売を通して、ロボットが活躍できる場をいっそう拡大させると共に、数多くの研究、開発プロジェクトをさらに加速、深化させていくことを支援してまいります。
台車ロボットへの搭載に対応し、単体での使用も可能
AMIR 740は、ヴイストン株式会社製の研究開発用台車ロボットの天板に搭載できるように設計されています。台車ロボットに内蔵されたバッテリーからAMIR 740に直接給電することが可能で、自律移動や自動運搬などの用途において大きな自由度が得られます。
なお弊社におきましては、研究開発用台車ロボット「メガローバーF120A」への搭載と運用を確認しておりますが、あらゆる姿勢、把持物体において転倒しないことを実現しているものではありません。運用においては、対象物体の重量や、台車ロボットおよびロボットアームを含めた全体の重心位置を確認していただくと共に、動作時の周囲の安全確保も入念に実施してください。
研究開発用台車ロボット「メガローバーVer.3.0」などの、より小型な筐体への本製品の搭載も可能ですが、その場合には、台車ロボット側の重量とサイズの関係から、ロボット全体がより転倒しやすくなります。また、AMIR 740を単体のロボットアームとして運用することも可能です。AMIR 740には、専用の直流安定化電源と非常停止スイッチが付属されるため、AC100Vの電源から給電し動作させることが可能です。
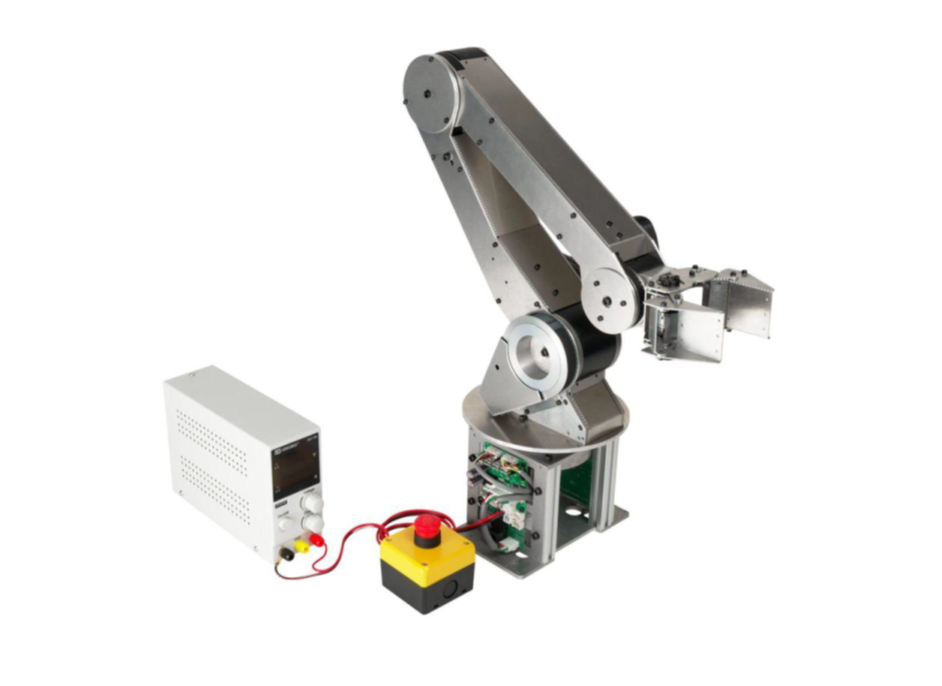
直流安定化電源と非常停止スイッチを付属
アームを搭載することによる可能性の拡大
本製品を弊社製の研究開発用台車ロボットに搭載することで、台車ロボットという機動力にロボットアームという「手先」が付加されることとなります。台車ロボットには、LiDAR(LRF)やデプスカメラ、またそれらを制御する「ROS PCオプション」などの豊富な機材を同時に搭載可能なので、各種センサーによる計測とPCによる処理、ROSを経由した制御などを統合して活用することができます。物体を持ち上げて運搬する用途や対象物に触れる用途など、台車ロボット単独では実現が困難であった研究、開発のプロジェクトを推進することを可能とします。
ユーザー側の活用次第では、画像処理や各種センサーによる測距と組み合わせた自律型ピッキングロボットシステムの構築や、搬送用台車とロボットアームとを統合的に運用するモデルなど、高度で複雑な開発プロジェクトを、より実用化に近い形で研究、実装することが期待できます。
アームを使った様々な開発が可能
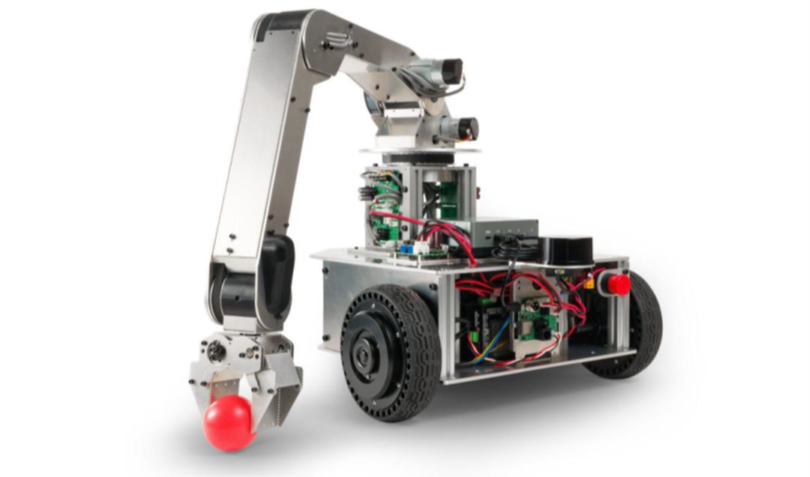
90mmまで開くグリッパーを標準搭載

AMIR 740には、90mmの幅まで開くグリッパーが標準搭載されています。台車ロボットの移動性能とロボットアームの姿勢制御を活用し、様々な物体を把持することが可能です(あらゆる物体を把持できるものではありません)。
アームの可搬重量2kg、最大リーチ740mmを実現
本製品においては、アルミニウム製の頑丈な構造とDCモーターの駆動力を活用することにより、アーム単体としての可搬重量2kgを実現しました。最大リーチは、軸1の回転中心から手先の中心までで740mmを実現しており、最大リーチ時でも2kgの可搬重量を維持します。ロボットアームとして実用的なサイズと耐久性、可搬重量を実現しています。
可搬重量2kgを実現
Arduino IDEでプログラム可能
本製品にはロボット用制御ボード「VS-WRC058」が搭載されており、Arduino IDEを用いて制御プログラムを作成することができます。サンプルコードはArduinoライブラリーの形で製品に付属し提供されますので、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。
※VS-WRC058をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.13以上が動作する環境が必要です。ROSによる制御に対応
AMIR 740は、ROS(ROS1)による制御に対応しています。弊社製の「ROS PCオプション」など、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、ROSから本製品に対して目標位置と移動速度指令値を与えられるほか、本製品からは各軸のエンコーダー値を取得することができます。
本製品には3Dシミュレーターである「Gazebo」用のモデルが標準で付属しており、モーションプランニングフレームワークである「MoveIt」にも対応しています。制御が複雑になりがちな多関節ロボットアームでありながら、GUI上で容易に操作、シミュレーションを行うことができ、シミュレーター上で検証を繰り返してからプログラムを実機へと反映させることで、合理的で迅速な開発が可能です。
なお、ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は次の通りです(本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります)。
【ROS使用時の推奨動作環境】
| OS | Ubuntu20.04 (64bit) |
| ROS | ROS Noetic |
| CPU | AMD Ryzen. 5 3550H |
| メモリ | 16GB |
| ストレージ | M.2 SSD 250GB |
| グラフィック | Radeon. Vega 8 Graphics |
※ 上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
※ 仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
02製品仕様
| 本体重量 | 約7.1kg |
|---|---|
| 可搬重量 | 2kg |
| 本体材質 | アルミニウム |
| 自由度 | 6軸(5軸+1グリッパー) |
| 入力電源 | 24V 10A |
| 把持範囲 | 90mm |
| モーター | DCモーター×6 |
| 最大速度 | 60deg/s |
| 動作角度等 |
J1(根元ヨー軸):±170度 J2(根元ピッチ軸):−135度〜0度 J3(肘ピッチ軸):0度〜+160度 J4(手先ピッチ軸):−75度〜+120度 J5(手先ロール軸):±158度 グリッパー:90mm(開) |
| エンコーダー | インクリメンタルエンコーダー |
| 制御基板 | VS-WRC058 |
| インターフェース | USBシリアル、Wi-Fi(IEEE802.11b/11g/11n) |
| SDK | VS-WRC058用 Arduinoライブラリー、ROSパッケージ |
| 付属品 | 直流安定化電源、固定用クランプ×2、非常停止スイッチ |
| ご購入はこちら | 台車用ロボットアーム AMIR 740 :770,000円(10%消費税込み) |
※製品の仕様は予告なく変更となる場合があります
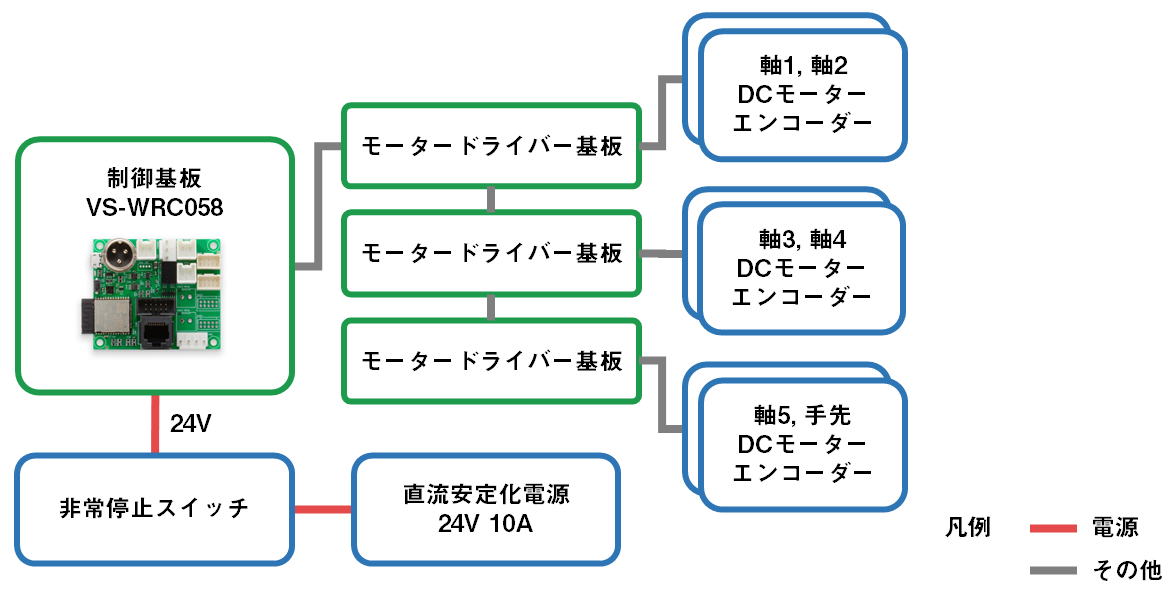
03構成図