ヴイストン株式会社
本製品は、生産・販売を終了いたしました。
01M3-Neony
 「M3-Neony(エムスリー・ネオニー)」は、人間とロボットの認知発達研究のために開発された、普及型ロボット・プラットフォームです。
「M3-Neony(エムスリー・ネオニー)」は、人間とロボットの認知発達研究のために開発された、普及型ロボット・プラットフォームです。
高い運動性能と多様な感覚機能を備えており、赤ちゃんの発達過程でみられる運動学習や、身体接触を伴う介助による学習などを研究することが可能です。
本製品は、科学技術振興機構(JST)の目的基礎研究事業の一環として、以下のプロジェクトにおいて開発されたものです。
戦略的創造研究推進事業 ERATO型研究
- 研究プロジェクト:「浅田共創知能システムプロジェクト」
- 研究総括:浅田 稔(大阪大学 大学院工学研究科 教授)
- 研究期間:平成17年度〜平成22年度
本研究は、「浅田共創知能システムプロジェクト」の社会的共創知能グループ(グループリーダー:石黒 浩・大阪大学 大学院基礎工学研究科 教授)が行いました。
02開発の背景と経緯
 人間が成長する過程での認知能力、コミュニケーション能力などの獲得と発達については、その詳細なメカニズムは未だに明らかにされていません。
人間が成長する過程での認知能力、コミュニケーション能力などの獲得と発達については、その詳細なメカニズムは未だに明らかにされていません。
これら人間の認知発達について、ロボット工学と人間科学とを融合させた「認知発達ロボティクス」という切り口で研究が進められていますが、より広範囲で の応用のためには、ロボット工学研究者に限らないさまざまな分野の研究者が容易に使うことのできるロボット・プラットフォームが必要です。
「M3-Neony(エムスリー・ネオニー)」には高い運動機能と各種のセンサーが搭載されており、寝返りや四つん這いなど乳幼児のような振る舞いを再現させることや、それを通した運動学習についてなど、さまざまな認知発達研究に活用が可能です。
このロボットは、「浅田共創知能システムプロジェクト」の社会的共創知能グループ(グループリーダー:石黒 浩・大阪大学 大学院基礎工学研究科 教授)による研究で開発されたものです。
名前の「M3」は、[WO]MAN MADE [WO]MAN(人造人間)に由来し、「Neony」は新生児を表す「neonate」にちなみました。
03プラットフォームとしての高い基本性能
高い運動性能
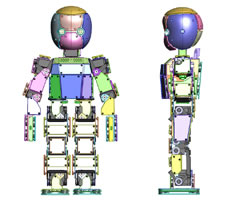
 全身に22の稼働軸(サーボモータ)を搭載しました。
このサーボモータ「VS-SV410」は、最大トルク41kgf・cm、回転速度0.14s/60°の高性能を誇っており、乳幼児の複雑で強力な動きを模倣させることが可能です。
全身に22の稼働軸(サーボモータ)を搭載しました。
このサーボモータ「VS-SV410」は、最大トルク41kgf・cm、回転速度0.14s/60°の高性能を誇っており、乳幼児の複雑で強力な動きを模倣させることが可能です。
![]() 「V-SERVO」の詳細ページはこちら
「V-SERVO」の詳細ページはこちら
各種の内蔵センサ
 全身に90の触覚センサを搭載したほか、姿勢制御用として2軸のジャイロセンサ、3軸の加速度センサを搭載しております。また、頭部に2個のWebカメラと2個のマイクを内蔵しております。
全身に90の触覚センサを搭載したほか、姿勢制御用として2軸のジャイロセンサ、3軸の加速度センサを搭載しております。また、頭部に2個のWebカメラと2個のマイクを内蔵しております。
多彩な内蔵センサ群が、様々な姿勢や外部刺激を元にした認知発達に関する研究を可能にします。
すぐれた開発容易性と汎用性
 x86タイプの小型PCを内蔵しており、自由度の高い運用が可能です。サブCPUとしてVS-RC003HVを搭載しているため、内蔵あるいは外部のコンピュータを用いてのモーション作成やモータの制御などが可能です。
x86タイプの小型PCを内蔵しており、自由度の高い運用が可能です。サブCPUとしてVS-RC003HVを搭載しているため、内蔵あるいは外部のコンピュータを用いてのモーション作成やモータの制御などが可能です。
![]() 「VS-RC003HV」のご購入はこちら
「VS-RC003HV」のご購入はこちら
