���C�X�g���������
01��e�ʃo�b�e���[���� ���J�i�����[�o�[G40A-LB

���J�i�����[�o�[G40A-LB�́A�����J���p��ԃ��{�b�g�u���J�i�����[�o�[Ver.3.0�v�ɑ�e�ʂ̃o�b�e���[�𓋍ڂ����h�����f���ł��B���d�ʖ�40kg�͈ێ������܂܁A��4�{�̉ғ����ԁi���Г��ł̎����A�v�Z���ʂɂ��܂��j���������܂����B
�lj��H��J�X�^�}�C�Y���s���₷���A���~�j�E������➑́A�\�t�g�E�F�A�J����e�ՂȂ��̂Ƃ���Arduino IDE�Ή��A�_��ō��x�Ȑ������������ROS 1�����ROS 2�Ή��A�É���������������_�C���N�g�h���C�u�^�C�v�̃C���z�C�[�����[�^�[�Ȃǂ̗D�ꂽ�����͂��̂܂܌p�����Ă��܂��B
��e�ʃo�b�e���[�𓋍ڂ������Ƃɂ��A�d�͏���傫�Ȋg���@��𓋍ڂ����ꍇ�ɂ������ԉғ��������ł��A��ԃ��{�b�g�̊��p�͈͂�����Ɋg�傷�邱�Ƃ��\�ł��B
���C�X�g��������Ђł́A�{���f���̔����ɂ���āA���v���g�傷�鎩�������E��������̗p�r��A��^�E���@�\�ȃR�~���j�P�[�V�������{�b�g�̎����Ȃǂɍv�����ĎQ��܂��B
��e�ʂ�Li-Fe�o�b�e���[�𓋍ڂ��A�ғ����Ԃ��g��
���J�i�����[�o�[G40A-LB�ɂ́A1440Wh�i24V 60Ah�j��Li-Fe�o�b�e���[�𓋍ڂ��܂����B��{���f���ł��郁�J�i�����[�o�[Ver.3.0��288Wh�ɑ��āA�o�b�e���[�e�ʂ���5�{�Ɋg�傳��܂����B
���Г������ɂ���������l�ɂ����ẮA���J�i�����[�o�[Ver.3.0�̉ғ����Ԃ���28���Ԃł���Ƃ���A�{���i�ɂ����Ă͖�113���ԂƂȂ�A��4�{�̉ғ����Ԃ���������܂����i���ۂ̉ғ����Ԃɂ��ẮA���ڋ@��⓮��v���O�����A�g�p�Ȃǂɂ��傫���ϓ����܂��B�����܂ŎQ�l�l�Ƃ��l�����������j�B
�����J���p��ԃ��{�b�g�ɂ����ẮA�l�X�ȑ���@��̂ق��A�摜�����E����̂��߂̉��Z���u�Ȃǂ����ڂ���邱�Ƃ������A�v������鏈���̍��x���ɏ]���āA�@�ނ���^������X��������܂��B���J�i�����[�o�[G40A-LB�ɂ����ẮA�����̊g���@��𓋍ڂ���p�r�ɂ����Ă��A����Ȃ钷���ԉғ����������邱�Ƃ��ł��܂��B
���d�ʖ�40�s�����������l�փ��J�i���z�C�[���\��
�{���i�ł́A�O��E���E�E��]�̓��������R�ɑg�ݍ��킹�邱�Ƃ��ł���l�փ��J�i���z�C�[�����̗p���Ă��܂��B��ԃ��{�b�g�{�̂̌�����ς��Ȃ��܂ܐ^����ߕ����Ɉړ�����ȂǁA�O������̈ʒu����ɏ_��ɑΉ��ł��邱�Ƃ��傫�ȓ����ł��B
�܂��A��40�s�̉��d�ʂ��������A�����ł̍ō����x��1.6m/s��B�����Ă���A�����J���p�̑�^��Ԃł���Ȃ���A���p�E���������������{�i�I�Ȏ��؎����Ȃǂɂ��Ή����܂��B
���{���i�͏�p���Ӑ}���Đv���ꂽ���̂ł͂���܂���B

�l�փ��J�i���z�C�[�����̗p
�L�� / �����ڑ��ɂ�鐧�䂪�\
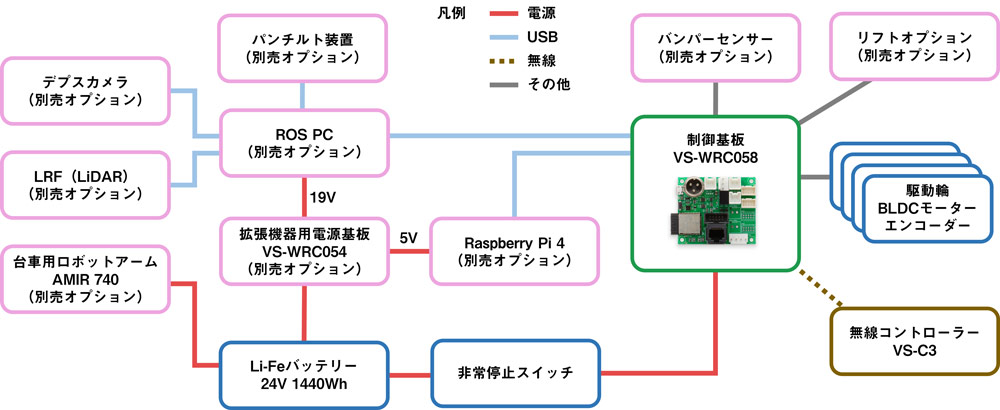
���J�i�����[�o�[G40A-LB�́AWi-Fi�ɂ�閳���ʐM�ƗL����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
�܂��A���{�b�g�p�����R���g���[���[�uVS-C3�v���W���ŕt�����邽�߁APC����ڑ����Ȃ��Ă��{�̂����c���邱�Ƃ��ł��܂��B�A�i���O�X�e�B�b�N���g�p���āA�O��ֈړ��A��]�����邱�Ƃ��ł��A����m�F�̂��߂̎蓮���c�A��펞�̑����i���Ƃ��Ďg�p�\�ł��B
Arduino IDE�Ńv���O�����\
�{���i�ɓ��ڂ���Ă��鐧��{�[�h�uVS-WRC058�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��ł��܂��B�T���v���R�[�h��Arduino���C�u�����[�̌`�Ő��i�ɕt��������܂��̂ŁA���[�U�[���g�̎�Ńt�@�[���E�F�A�̃J�X�^�}�C�Y�����{���邱�Ƃ��\�ł��B
��VS-WRC058��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.19�ȏオ���삷������K�v�ł��B

������ VS-WRC058c
�g�����₷���A���~�t���[�����̗p
�{���i�̖{�̃t���[���̓A���~���ނɂč\������Ă��܂��B�\���ȋ��x�����Ɠ����ɉ��H���e�ՂȂ̂ŁA���[�U�[���g�̎�ŁA�l�X�Ȋg����e�Ղɍs�����Ƃ��ł��܂��B�㕔�V�Ɏ��t�������J���ĕ��i��lj����邱�Ƃ��\�ŁA�����E�J���̐��i�Ɍ������Ȃ����R�Ȋg�����������炵�܂��B
����~�X�C�b�`��W������
�{���i�ɂ́u����~�X�C�b�`�v��W�����ڂ��Ă��܂��B�܂��A����~�X�C�b�`�̎��t���ʒu�́A�z���̒����⑼�@��Ƃ̊ɏՂ̖�肪�Ȃ�����͎��R�ɕύX�\�ł��B���^�p�̏�A�lj�����g���@��̓��ڏȂǂɉ����A���[�U�[���ŕt���ւ��Ďg�p���邱�Ƃ�z�肵�Ă��܂��B
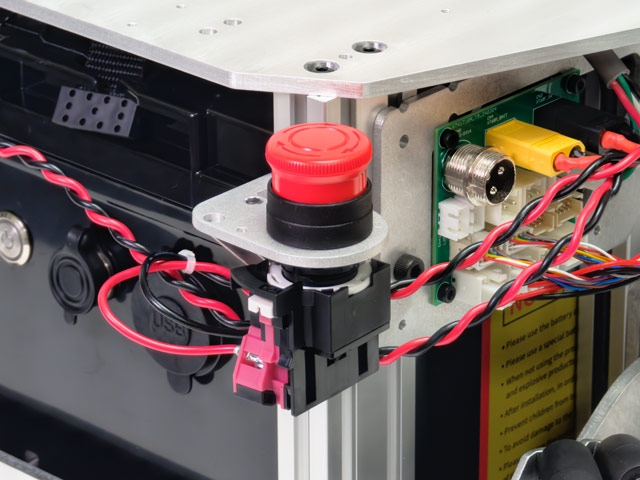
����~�X�C�b�`��W������
ROS�iROS 1�AROS 2�j�ɂ�鐧��ɑΉ�
���J�i�����[�o�[G40A-LB��ROS 1�����ROS 2���b�Z�[�W�ʐM�ɑΉ����Ă���AROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁArosserial��������micro-ROS��p����ROS�̃��b�Z�[�W�ʐM���\�ł��B
�T���v���t�@�[���E�F�A�ł́Ageometry_msgs/Twist�^��������geometry_msgs/msg/Twist�^���g���āAROS���烁�J�i�����[�o�[�ɑ��Ĉړ����x�w�ߒl�𑗐M������A���J�i�����[�o�[���猻�ݑ��x��o�b�e���[�d�����擾�����肷�邱�Ƃ��\�ł��B
�܂��A���[�U�[�̎�ɂ���ăt�@�[���E�F�A��ύX���邱�ƂŁA��L�̑��ɂ��C�ӂ̃��b�Z�[�W�𑗎�M���邱�Ƃ��\�ł��B
�Ȃ��AROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͎��̒ʂ�ł�
���{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
�yROS 2�g�p���̐���������z
| OS | Ubuntu22.04 (64bit) |
| ROS | ROS 2 Humble |
| CPU | IntelR CoreTM Ultra 5 125H Processor |
| RAM | 32GB |
| �X�g���[�W | M.2 SSD 256GB |
| �O���t�B�b�N | IntelR ArcTM GPU |
�� ROS PC�I�v�V�������g�p���Ȃ��ꍇ�AROS�̊��̓��[�U�[�ɂč\�z���������K�v������܂��B
�� ��L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
�� ���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
���ʂȃI�v�V�����i�ɑΉ�
���J�i�����[�o�[G40A-LB�́A�������̃I�v�V�����i�ɑΉ����Ă��܂��B�p�r�ɍ��킹�ăZ���T�[��\�����i��lj����邱�Ƃ��\�ŁA���l�Ȍ����E�J������ɂāA��e�ʃo�b�e���[�̗��_�����p���A��^�̌����J���p��ԃ��{�b�g�̔\�͂𑶕��Ɋ��p���邱�Ƃ��ł��܂��B

�g���@�퓋�ڗ�
LRF�I�v�V����TG30�i�O�A��j�AROS PC�iNUC14�j�I�v�V�����A�g���@��p�d����I�v�V���� VS-WRC054 �𓋍�
02���i�d�l
| ���i�� (�^��) |
���J�i�����[�o�[G40A-LB |
|---|---|
| �T�C�Y | W403�~L402.45�~H270 (mm) ���T�X�y���V�����̏�Ԃɂ��A�ԗ������͕ϓ����܂� |
| �{�̏d�� | ��25.4kg |
| �ō����x�i�����l�j | 1.6m/s |
| �ύڏd�� | ��40kg |
| �{�̍ގ� | �A���~�j�E�� |
| �o�b�e���[ | 24V 60Ah (1440Wh) Li-Fe�o�b�e���[ |
| �쓮���� | �l�쓮���J�i���z�C�[���A�T�X�y���V�������� |
| �^�C�����a | 152mm |
| ���[�^�[ | BLDC���[�^�[ 40W�~4 |
| ������ | VS-WRC058 |
| ROS�Ή� | ROS 1�����ROS 2�ɑΉ� |
| SDK | ���J�i�����[�o�[G40A-LB�p Arduino���C�u�����[�AROS�p�b�P�[�W |
| ���^�T���v��
���{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂� |
�yArduino���C�u�����[�z �ԗ��� �e��ʐM�@�\�� �yROS 1�p�T���v���R�[�h�z �Q�[���p�b�h����̑��� �}�E�X�i�^�b�`�p�b�h�j����̑��� SLAM�igmapping�j navigation �yROS 2�p�T���v���R�[�h�z ���[�o�[�Ƃ̒ʐM �I�h���g���̎擾 �}�E�X�i�^�b�`�p�b�h�j����̑��� |
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�iIEEE802.11b/11g/11n�j |
| �t���i | �[�d��A���{�b�g�p�����R���g���[���[�uVS-C3�v |
| �������I�v�V���� |
���[�U�����W�t�@�C���_�[ �o���p�[�I�v�V�����i�O��A�S���́j �g���@��p�d����� VS-WRC054 Raspberry Pi 4B ROS PC �J�����X�e�[ �f�v�X�J���� �p���`���g���u �����[�g���� ��ԗp���{�b�g�A�[�� AMIR 740 ���t�g�I�v�V���� @mobi�Ή��n�[�h�E�F�A�Z�b�g |
| ���w���͂����� | ���J�i�����[�o�[G40A-LB |
�� �{���i�͉�����p�ł��B���O�ł̎g�p�͑z�肵�Ă���܂���B �܂��A���i�̎d�l�͗\���Ȃ��ύX�ƂȂ�ꍇ������܂��B
03�n�[�h�E�F�A�\��
���J�i�����[�o�[G40A-LB
���C�X�g���AVstone�ARobot Shop�i���{�b�g�V���b�v�j�́A���C�X�g��������Ђ̓o�^���W�ł��B
@mobi�́A�p�i�\�j�b�N�A�h�o���X�g�e�N�m���W�[������Ђ̓o�^���W�ł��B
Arduino�́AArduino AG�̓o�^���W�ł��B
Intel�AIntel Core�AIntel Arc�́AIntel Corporation �܂��͂��̎q��Ђ̓o�^���W�܂��͏��W�ł��B
Ubuntu��Canonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Zoom��Zoom Video Communications, Inc.�̃T�[�r�X�ł���AZoom���S��Zoom Video Communications, Inc.�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̓o�^���W�܂��͏��W�ł��B
Raspberry Pi��Raspberry Pi���c�̓o�^���W�܂��͏��W�ł��B
ROS�́AOpen Source Robotics Foundation, Inc.�ɂ��I�[�v���\�[�X�̃v���W�F�N�g�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̓o�^���W�܂��͏��W�ł��B
