ヴイストン株式会社
01大容量バッテリー搭載 メガローバーS40A-LB
メガローバーS40A-LBは、ヴイストン株式会社製の研究開発用台車ロボットシリーズの中核モデルである「メガローバーVer.3.0」の派生モデルです。
従来比で容量が約5倍となるバッテリーを搭載したほか、2個の駆動輪を車体の前後中央に搭載することで、車体の中心を軸としたその場旋回が可能となりました。
大容量バッテリーによる安定した稼働性能と、多くの機器を搭載した場合でも安定・確実な旋回が可能な機体構造とを両立させた本製品は、実用化を見据えた本格的な実証実験や、長時間の運用が必要とされる研究・開発用途などに適しています。
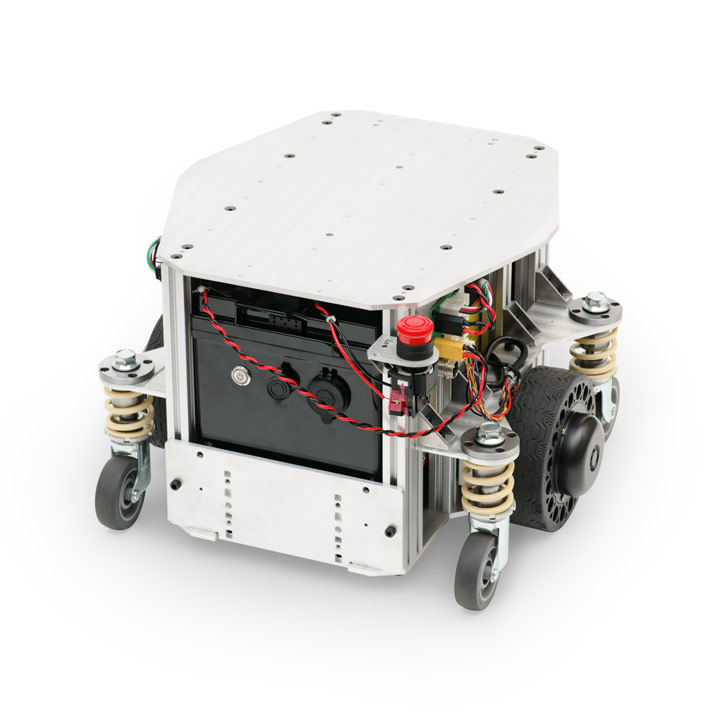
駆動輪を車体の中央に配置し、超信地旋回が可能
メガローバーS40A-LBでは、2個の駆動輪を車体の前後方向に対して中央に配置しています。 この構造により、車体の中心を軸としたその場回転を行うことが可能となっています(通常モデルである「メガローバーVer.3.0」では駆動輪の搭載位置が前後方向の中心ではないため、その場で回転する際の軸は車体の中心ではありません)。 これにより、多数の機器を搭載するなど、ロボットの機体全体が大型になる場合に、より安定した運用が見込めます。また、メガローバーVer.3.0と同様、駆動輪は通常の車輪であるため、安定・静粛な動作が可能です。

駆動輪を車体の前後方向に対して中央に配置
大容量のLi-Feバッテリーを搭載し、稼動時間を拡大
メガローバーS40A-LBには、1440Wh(24V 60Ah)のLi-Feバッテリーを搭載しました。基本モデルであるメガローバーVer.3.0の288Whに対して、バッテリー容量が約5倍に拡大されました。
弊社内条件における実測値においては、メガローバーVer.3.0の稼動時間が約42時間であるところ、本製品においては約155時間となり、約3.7倍の稼動時間が実現されました(実際の稼動時間については、搭載機器や動作プログラム、使用状況などにより大きく変動します。あくまで参考値とお考えください)。
研究開発用台車ロボットにおいては、様々な測定機器のほか、画像処理・情報処理のための演算装置などが搭載されることも多く、要求される処理の高度化に従って、機材も大型化する傾向があります。 メガローバーS40A-LBにおいては、多くの拡張機器を搭載する用途においても、さらなる長時間稼働を実現することができます。
有線 / 無線接続による制御が可能
メガローバーS40A-LBは、Wi-Fiによる無線通信と有線のUSBシリアル通信に対応しています。指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスから制御することが可能です。
また、ロボット用無線コントローラー「VS-C3」が標準で付属するため、PC等を接続しなくても本体を無線操縦することができます。アナログスティックを使用して、前後へ移動、回転させることもでき、動作確認のための手動操縦、非常時の操作手段等として使用可能です。
Arduino IDEでプログラム可能
本製品に搭載されている制御ボード「VS-WRC058」には、ESP32-WROOM-32マイコンが搭載されており、Arduino IDEを用いて制御プログラムを作成することができます。サンプルコードはArduinoライブラリーの形で製品に付属し提供されますので、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。
※VS-WRC058をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.19以上が動作する環境が必要です。

制御基板 VS-WRC058c
拡張しやすいアルミフレームを採用
本製品の本体フレームはアルミ部材にて構成されています。十分な強度を持つと同時に加工が容易なので、ユーザー自身の手で、様々な拡張を容易に行うことができます。上部天板に取り付け穴を開けて部品を追加することも可能で、研究・開発の推進に欠かせない自由な拡張性をもたらします。
非常停止スイッチを標準搭載
本製品には「非常停止スイッチ」を標準搭載しています。また、非常停止スイッチの取り付け位置は、配線の長さや他機器との緩衝の問題がない限りは自由に変更可能です。実運用の状況や、追加する拡張機器の搭載状況などに応じ、ユーザー側で付け替えて使用することを想定しています。
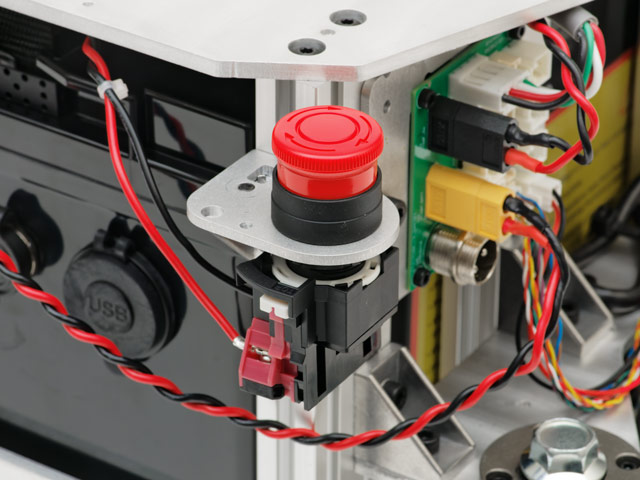
非常停止スイッチを標準搭載
ROS(ROS 1、ROS 2)による制御に対応
メガローバーS40A-LBはROS 1およびROS 2メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialもしくはmicro-ROSを用いたROSのメッセージ通信が可能です。
サンプルファームウェアでは、geometry_msgs/Twist型もしくはgeometry_msgs/msg/Twist型を使って、ROSからメカナムローバーに対して移動速度指令値を送信したり、メカナムローバーから現在速度やバッテリー電圧を取得したりすることが可能です。
また、ユーザーの手によってファームウェアを変更することで、上記の他にも任意のメッセージを送受信することが可能です。
なお、ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は次の通りです
※本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります。
【ROS 2使用時の推奨動作環境】
| OS | Ubuntu22.04 (64bit) |
| ROS | ROS 2 Humble |
| CPU | IntelR CoreTM Ultra 5 125H Processor |
| RAM | 32GB |
| ストレージ | M.2 SSD 256GB |
| グラフィック | IntelR ArcTM GPU |
※ ROS PCオプションを使用しない場合、ROSの環境はユーザーにて構築いただく必要があります。
※ 上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
※ 仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
多彩なオプション品に対応
メガローバーS40A-LBは、数多くのオプション品に対応しています。用途に合わせてセンサーや構成部品を追加することが可能で、多様な研究・開発分野にて、大容量バッテリーの利点を活用しながら、大型の研究開発用台車ロボットの能力を存分に活用することができます。
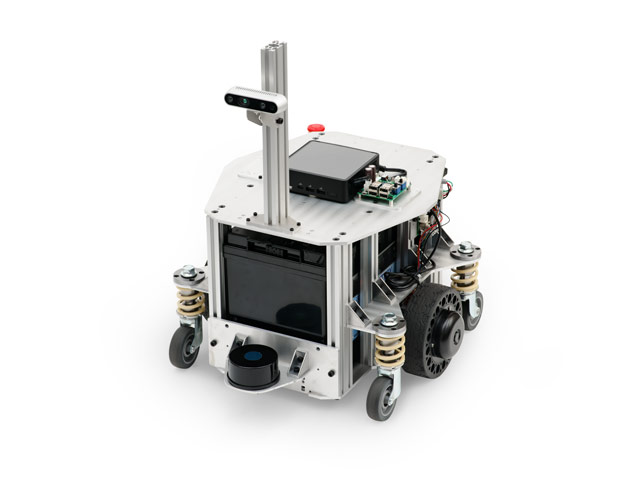
拡張機器搭載例
LRFオプションTG30(前、後)、ROS PC(NUC14)オプション、拡張機器用電源基板オプション VS-WRC054、デプスカメラオプション を搭載
02製品仕様
| 製品名 (型番) |
メガローバーS40A-LB |
|---|---|
| サイズ | W437×L362×H270(mm) ※サスペンションの状態により、車両高さは変動します |
| 本体重量 | 約23.5kg |
| 最高速度(実測値) | 1.6m/s |
| 積載重量 | 約40kg |
| 本体材質 | アルミニウム |
| バッテリー | 24V 60Ah (1440Wh) Li-Feバッテリー |
| 駆動方式 | 2輪駆動、キャスター×4(いずれもサスペンション搭載) |
| タイヤ直径 | 140mm |
| モーター | BLDCモーター 40W×2 |
| 制御基板 | VS-WRC058 |
| ROS対応 | ROS 1およびROS 2に対応 |
| SDK | メガローバーS40A-LB用 Arduinoライブラリー、ROSパッケージ |
| 収録サンプル
※本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります |
【Arduinoライブラリー】 車輪制御 各種通信機能等 【ROS 1用サンプルコード】 ゲームパッドからの操作 マウス(タッチパッド)からの操作 SLAM(gmapping) navigation 【ROS 2用サンプルコード】 ローバーとの通信 オドメトリの取得 マウス(タッチパッド)からの操作 |
| インターフェース | USBシリアル、Wi-Fi(IEEE802.11b/11g/11n) |
| 付属品 | 充電器、ロボット用無線コントローラー「VS-C3」 |
| 注文時オプション |
レーザレンジファインダー バンパーオプション(前後、全周囲) 拡張機器用電源基板 VS-WRC054 Raspberry Pi 4B ROS PC カメラステー デプスカメラ パンチルト装置 リモート制御 台車用ロボットアーム AMIR 740 リフトオプション @mobi対応ハードウェアセット |
| ご購入はこちら | メガローバーS40A-LB |
※ 本製品は屋内専用です。屋外での使用は想定しておりません。 また、製品の仕様は予告なく変更となる場合があります。
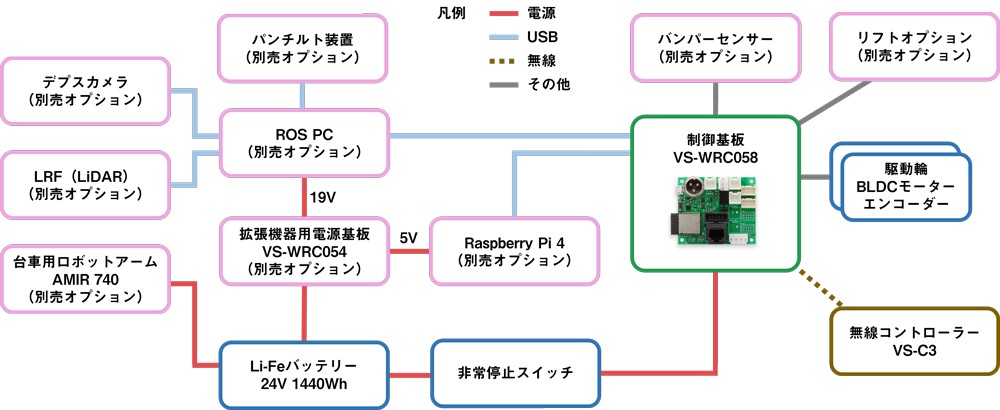
03ハードウェア構成
メガローバーS40A-LB
ヴイストン、Vstone、Robot Shop(ロボットショップ)は、ヴイストン株式会社の登録商標です。
@mobiは、パナソニックアドバンストテクノロジー株式会社の登録商標です。
Arduinoは、Arduino AGの登録商標です。
Intel、Intel Core、Intel Arcは、Intel Corporation またはその子会社の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
ZoomはZoom Video Communications, Inc.のサービスであり、ZoomロゴはZoom Video Communications, Inc.の登録商標です。
BluetoothRは、Bluetooth SIG, Inc. USAの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
