���C�X�g���������
01�h�o�E�h�H���ލ̗p�� ���K���[�o�[Ver.3.0 ���O�Ή���

���K���[�o�[Ver.3.0 ���O�Ή��ł́A���Ђ��D�]�������̌����J���p��ԃ��{�b�g�ł��郁�K���[�o�[�ɁA�h�o�E�h�H���\�������i�𓋍ڂ����A�o���G�[�V�������f���ł��B�������̃��K���[�o�[Ver2.1�̓����ł���A�V���v���Ȓʏ�ԗւɂ���쓮�\����A��^➑̂ɂ�鍂�ωd���\�͂��̂܂p���ł���A��v���i�ɖh�o�E�h�H���\�������ނ��̗p���邱�ƂŁA����܂Ŋ��p������������O���ȂǁA�J�H�⍻�o�̑z�肳�����ł̉^�p���\�ƂȂ�܂����B
���C�X�g��������Ђł́A�{���i�̔�����ʂ��āA����܂ō���ł��������O���ł̎��������ԃ��{�b�g�̊J���E�^�p��e�ՂȂ��̂Ƃ��A�����܂��܂����v�̍��܂��Ă��鎩������E���������Z�p�̊J���Ɣ��W��͋����㉟�����Ă܂���܂��B
IP65�����̖h�o�E�h�H�p�[�c���̗p
�@�{���i�ł́A��v���i��IP65(��1)�����̖h�o�E�h�H���\�����p�[�c���̗p���܂����B�h�o�E�h�H�^�C�v�̃C���z�C�[�����[�^�[��P�[�X�A�R�l�N�^�[�ɂč\�����邱�ƂŁA��ԃ��{�b�g�S�̖̂h�o�E�h�H���\��啝�Ɍ��コ���Ă��܂��B����ɂ��A���o��J�H�̑z�肳��鉮�O���ł̓��삪�\�ƂȂ�܂���(��2��3)�B
�@�Ȃ��{���i�ɂđz�肵�Ă��鉮�O���́A�A�X�t�@���g�ܑ��Ȃǂ��{���ꂽ���R�Ȓn�ʂ݂̂ƂȂ��Ă���܂��B����y�̏�A�����܂�Ȃǂ�������ł́A�ԗւ��������O���b�v���Ȃ��A�@�̂̑z�肵�Ă���h�o�E�h�H���x������Ȃǂ̖�肪��������\�������邽�߁A�������Ă��܂���B�܂��A�{���i�̂��h�o�E�h�H���\�́A�̗p���Ă���p�[�c�̎d�l����Z�o�����v�l�ł���A�ۏؒl�ł͂���܂���B
4571398313882_4.jpg)
�h�o�E�h�H�\���̃C���z�C�[�����[�^�[�Ȃǂ��̗p
��1�c���o�̐N�����h�삳��Ă���A���A�������������̐��̒��ڕ����ɂ���Ă��e�����Ȃ��Ƃ����K�i�ł�
��2�c�{���i�̖h�o�E�h�H���\�́A�g�p���̏����ɂ���č��E����܂��B�h���p�b�L���̕����ɍ��o��є��A���H�Ȃǂ����܂�ƁA�z�肵���h�o�E�h�H���\�������ł��Ȃ��ق��A�������i�̎v��ʑ������N�����\��������܂��̂ŁA�^�p�ɂ����Ă͏\�����C��t�����������B�܂��A�{�̃P�[�X���h�o�E�h�H���\������Ă��܂��̂ŁA�l�X�Ȋ����ł̉^�p��ɂ́A�{�̃P�[�X���̎��x���㏸���A������̕��H�⑹���������N�����\��������܂��B���S�̂��߁A���^�p�ɂ����ẮA���o�E���H�E���x���̊m�F��K�ȃR���g���[�������{���Ă��������B
��3�c�{���i�őz�肵�Ă��鐅�H�͏퉷�̐^���݂̂ł��B�����ⓒ�A�Ό����ȂǁA�^���ł͂Ȃ��t�̂��t�������ꍇ�A�z��̖h�H���\�������ł��Ȃ��ꍇ������܂��B�܂��A���H�ƂƂ��ɋ������́i�����A�����Ȃǁj��������ꍇ�A�z�肵�Ă���h�H�ڈ��߂���ꍇ������܂��B�����ӂ��������B
���d�ʖ�30�s������������쓮��ԃ��{�b�g
�@�{���i�́A�ʏ�^�C�v�̓�쓮�ւƈ�ւ̃L���X�^�[�����ڂ��ꂽ�A�O�֍\���ƂȂ��Ă��܂��B�ʏ�ԗւ��̗p�������Ƃɂ��A�����I�Ȑ���̂��₷���⓮�쎞�̐Ïl�����m�ۂ���Ă���A���p���x���܂ł�����������̓I�Ȍ����E�J�����\�ł��B�܂��A�h�o�E�h�H�\���̕��i���̗p���Ȃ���A���d�ʖ�30�s���������Ă���A��^�̎��������ԂȂ�ł̖͂{�i�I�ȉ^���p�r��z�肵�����p���ł��܂��B
�@���d�ʖ�30�s���������A�ō����x��1.6m/s��B�����Ă��邱�Ƃ������ŁA�P�Ɏԑ̂���^�Ȃ����ł͂Ȃ��A�\���ȉ^�����\�������Ă��܂��B
�� �{���i�͏�p���Ӑ}���Đv���ꂽ���̂ł͂���܂���B
�g�����₷���A���~�t���[�����̗p
�@�{���i�̖{�̃t���[���͊g�������{���₷���A���~���ނɂč\������Ă���A���[�U�[���g�̎�ŁA�l�X�Ȋg����e�Ղɍs�����Ƃ��ł��܂��B�Ȃ��A�S�̂̐��\�ێ��̂��߁A�g�����i�̑I�����t�����ɂ́A�h�o�E�h�H�����l�����Ă��������K�v������܂��B
4571398313882_2.jpg)
�g�����₷���A���~�t���[�����̗p
�L�� / �����ڑ��ɂ�鐧�䂪�\
�@���K���[�o�[Ver.3.0 ���O�Ή��ł́AWi-Fi�ɂ�閳���ʐM�ƗL����USB�V���A���ʐM�ɑΉ����Ă��܂��B�w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
�@�܂��A�Q�[���p�b�h�^�����R���g���[���[���t�����邽�߁APC����ڑ����Ȃ��Ă��{�̂����c���邱�Ƃ��ł��܂��B�A�i���O�X�e�B�b�N���g�p���āA�O��ֈړ��A��]�����邱�Ƃ��ł��A����m�F�̂��߂̎蓮���c�A��펞�̑����i���Ƃ��Ďg�p�\�ł�
ROS1�ɂ�鐧��ɑΉ�
�@���K���[�o�[Ver.3.0 ���O�Ή��ł�ROS�iROS1�j���b�Z�[�W�ʐM�ɑΉ����Ă���AROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁArosserial�̃p�b�P�[�W��p����ROS1�̃��b�Z�[�W�ʐM���\�ł��B
�@�W���t�@�[���E�F�A�ł́Ageometry_msgs/Twist�^���g���āAROS���烁�K���[�o�[�ɑ��Ĉړ����x�w�ߒl�𑗐M������A���K���[�o�[���猻�ݑ��x��o�b�e���[�d�����擾�����肷�邱�Ƃ��\�ł��B�܂��A���[�U�[�̎�ɂ���ăt�@�[���E�F�A��ύX���邱�ƂŁA��L�̑��ɂ��C�ӂ̃��b�Z�[�W�𑗎�M���邱�Ƃ��\�ł��B
�@�Ȃ��AROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͎��̒ʂ�ł�
�� �{���i�Ɋ܂܂�Ȃ����C�u�����[�Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
�yROS�g�p���̐���������z
| OS | Ubuntu18.04 (64bit) | Ubuntu20.04 (64bit) |
| ROS | ROS Melodic | ROS Noetic |
| CPU | Core i5 8365U | AMD Ryzen5 3550H |
| ������ | DDR4 PC4-19200 8GB | DDR4 PC4-19200 16GB |
| �X�g���[�W | M.2 SSD 250GB | M.2 SSD 250GB |
| �O���t�B�b�N | ���� | ���� |
�� ��L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
�� ���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
Arduino IDE�Ńv���O�����\
�@�{���i�ɓ��ڂ���Ă��鐧��{�[�h�uVS-WRC058�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă���AArduino IDE��p���Đ���v���O�������쐬���邱�Ƃ��ł��܂��B�T���v���R�[�h��Arduino���C�u�����[�̌`�Ő��i�ɕt��������܂��̂ŁA���[�U�[���g�̎�Ńt�@�[���E�F�A�̃J�X�^�}�C�Y�����{���邱�Ƃ��\�ł��B
�� VS-WRC058��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.13�ȏオ���삷������K�v�ł��B
�t���̖����R���g���[���[�ŊȒP�ɑ��삪�\
�@�{���i�ɂ�Bluetooth�ڑ��̃Q�[���p�b�h�^�����R���g���[���[���t�����܂��B�����p���邱�ƂŁAPC����ڑ����Ȃ��Ă��{�̂����c���邱�Ƃ��ł��܂��B�A�i���O�X�e�B�b�N���g�p���āA�O��ֈړ��A��]�����邱�Ƃ��ł��A����m�F�̂��߂̎蓮���c�A��펞�̑����i���Ƃ��Ă��g�����������܂��B�Ȃ��A�����ł���uVS-WRC058�v�ɓ��ڂ���Ă���Bluetooth�@�\�́A�����R���g���[���[�̐ڑ��p�r��p�ƂȂ��Ă��܂��B
����~�X�C�b�`��W������
�@�{���i�ɂ́A�]���̃��f���ŕʔ��I�v�V�����ł������u����~�X�C�b�`�v��W�����ڂ��Ă��܂��B�����̎��v�������������X�C�b�`��W�����ڂƂ��邱�ƂŁA�g���₷��������Ɍ��コ���܂����B
4571398313882_6.jpg)
����~�X�C�b�`��W������
02���i�d�l
| ���i�� (�^��) |
���K���[�o�[Ver.3.0 ���O�Ή��� | ||
|---|---|---|---|
| ���i�i�Ŕ��j | 650,000�~ | ||
| �S�� | 611mm | ||
| �S�� | 585mm | ||
| �S�� | 199mm | ||
| �{�̏d�� | ��28.5kg | ||
| �ύڏd�� | ��30kg | ||
| �ō����x�i�����l�j | 1.6m/s | ||
| �o�b�e���[ | �V�[���h�^ ���o�b�e���[ 24V 26Ah�i624Wh�j | ||
| �쓮���� | 2�쓮 �㕔�L���X�^�[ �~1 |
||
| �^�C�����a | 140mm | ||
| ���[�^�[ | �h�o�h�H�^ BLDC���[�^�[ 40W�~2 | ||
| ROS�Ή� | ROS1�ɑΉ� | ||
| ������ | VS-WRC058 | ||
| SDK | VS-WRC058�pArduino���C�u���� ROS�p�b�P�[�W |
||
| ���^�T���v�� |
[Arduino���C�u����] �E�ԗ��� �E�e��ʐM�@�\�� [ROS�p�T���v���R�[�h] �E�Q�[���p�b�h����̑��� �E�}�E�X�i�^�b�`�p�b�h�j����̑��� �ESLAM�igmapping�j �ESLAM(cartographer) �Enavigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B |
||
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�iIEEE802.11b/11g/11n�j | ||
| �t���i | �[�d��A�������c�p�Q�[���p�b�h�^�R���g���[���[ | ||
| �������I�v�V���� | ROS PC�I�v�V���� �O��o���p�[ �g���@��p�d����� VS-WRC054 |
||
| ���w���͂����� | ���K���[�o�[Ver.3.0 ���O�Ή��� | ||
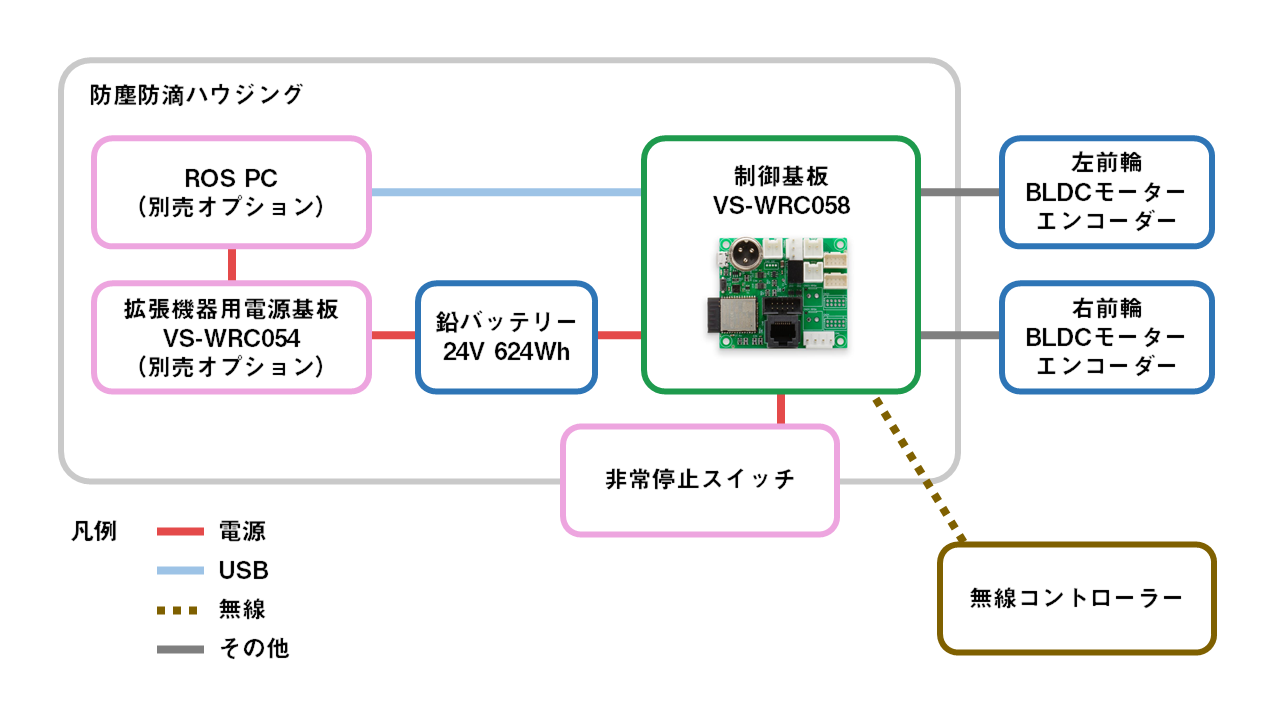
03�n�[�h�E�F�A�\��
���K���[�o�[Ver.3.0 ���O�Ή���
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
Ubuntu�́ACanonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Arduino�́AArduino AG�̓o�^���W�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̏��W�܂��͓o�^���W�ł��B
Intel�A�C���e���́A�A�����J���O������� / �܂��͂��̑��̍��ɂ����� Intel Corporation �܂��͂��̎q��Ђ̏��W�ł��B
Raspberry Pi��Raspberry Pi���c�̏��W�܂��͓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
