ヴイストン株式会社
01可搬重量約120kgを実現した メガローバーF120 発売
可搬重量約120kgを実現した「メガローバーF120」
メガローバーF120は、好評発売中の二輪駆動台車ロボットである「メガローバーVer2.1」をベースに、可搬重量を約120kgと大幅に強化した大型台車ロボットです。
十分な可搬重量と、二輪制御による安定性・取り扱いの容易性などを生かし、様々な用途での研究開発に活用できます。
メガローバーF120においては、豊富な実績を誇るメガローバーシリーズの基本構成を踏襲しつつ、本体構造やモーター出力などを大きく強化しています。
ArduinoIDE対応、ROS対応といった特徴はメガローバーVer2.1からそのまま引き継いでいるため、用途の種別を選ばない、多様な運用が可能となっています。
また、メガローバーをベースとして開発を進めたプロジェクトにおいて、台車ロボットの可搬重量を大幅に強化したいといったリプレース目的にも好適です。
 |
 |
 |
 |
可搬重量約120kgを実現
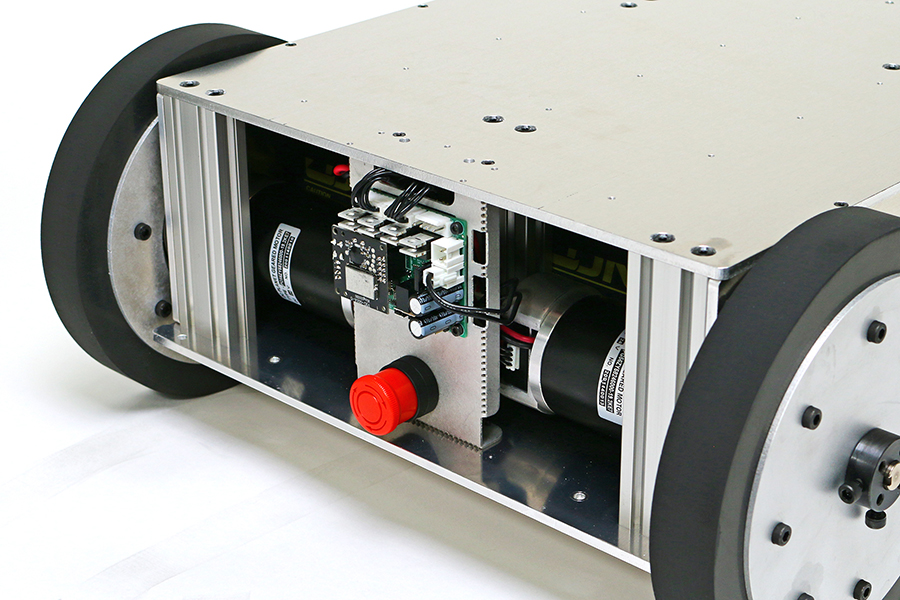
メガローバーF120は、大型のホイールやモーターを搭載することにより、シリーズ最大の可搬重量を実現しました。大型の筐体を実現するために車体構造やバッテリなどを見直し、これまでと変わらない可用性を目指しています。

メガローバーF120 研究開発イメージ
※本製品は乗用を意図して設計されたものではありません。また、大型の機体のため、開発や運用には十分な注意をお願いいたします。
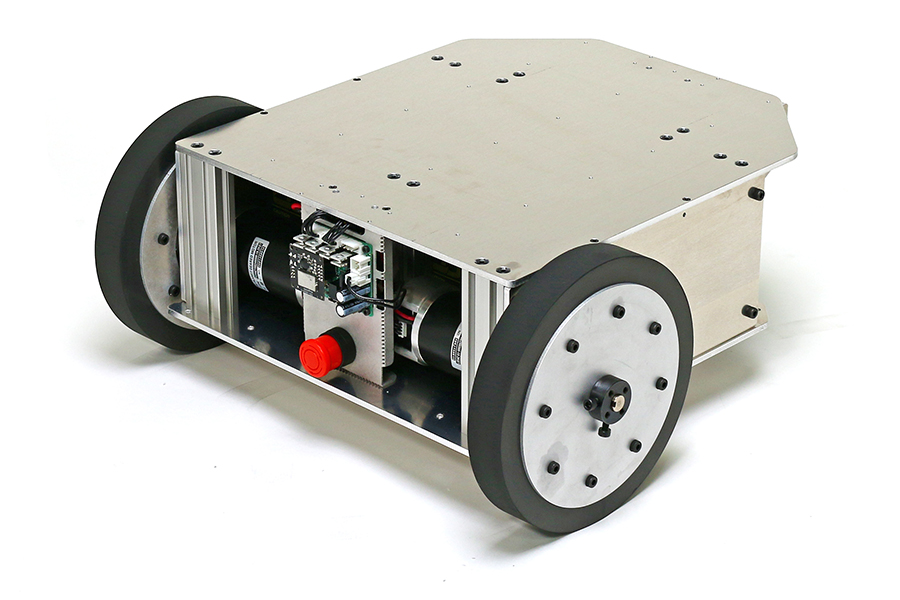
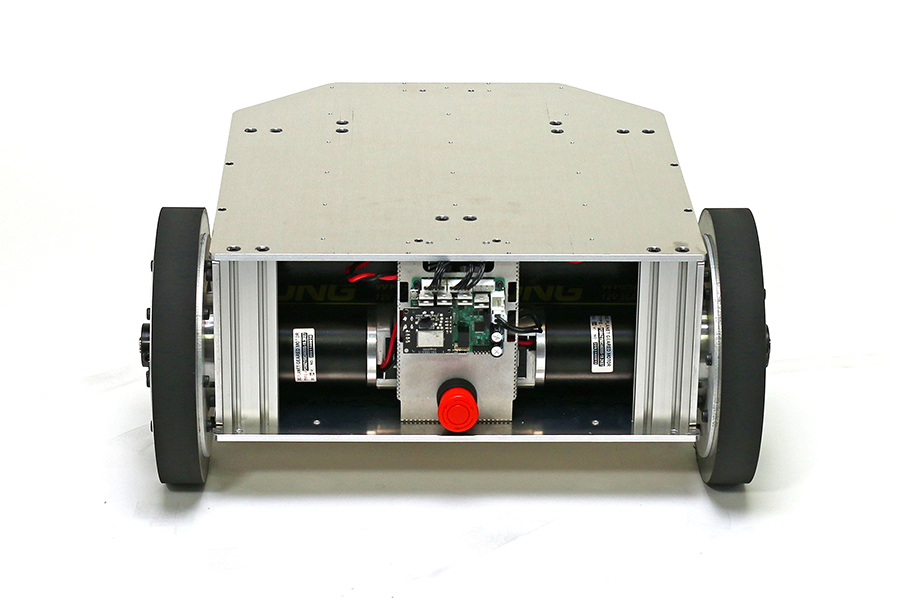
二輪駆動の大型台車ロボット
メガローバーF120は二輪駆動に後部キャスターを加えた構造となっています。通常車輪の制御であるため、前後移動、左右旋回などの挙動が周囲からも理解しやすく、耐久性や静粛性といった点でも有利となっています。 超大型の機体でありながら、最高速度は実測値で1.2m/sとし、様々な研究、開発用途に対応することができます。車輪の横滑りが発生しにくいなど、全方位移動機構を持つ台車ロボットと比較して、実運用における安定性を見込めることも特徴です。
有線/無線接続による制御
メガローバーF120は、Wi-Fi / BLE / BluetoothClassic の3種の無線通信と、有線のUSBシリアル通信に対応しています。 指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスから制御することが可能です。
※本製品は屋内専用です。屋外での使用は想定しておりません。
ROSメッセージ通信でコントロール
メガローバーF120は、ROSメッセージ通信に対応しています。ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、ROSを使った制御が可能となります。
ROSメッセージ通信を使うことで、速度や旋回量の指令値を、わずか数行のコードでメガローバーF120に送信することができ、ROSロボットとして幅広い活用が可能です。
導入ドキュメントと以下のサンプルプログラムが付属するため、初心者の方でも、ROS環境で制御システムを作成し、簡単に動かすことができます。
LRFなどのセンサを用いた高度な制御を、少ない開発負担で実装することが可能です。
ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は後述の通りです。
【ROSサンプルプログラム一覧】
- ゲームパッドからの操作
- マウス(タッチパッド)からの操作
- SLAM(gmapping)
- SLAM(cartographer)
- navigation
※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。
※SLAM、navigationを行うためにはLRFが必要です。LRFオプションのご利用が便利です。
【ROS使用時の推奨動作環境】
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 8259 | |
| メモリ | DDR4 PC4-19200 8GB | |
| ストレージ | M.2 SSD 256GB | |
| グラフィック | Intel Iris Plus Graphics 655 | |
下記条件を満たしていても、相性などにより、正常に動作しない場合があります。
仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
Arduino IDEでプログラム可能
メガローバーF120の制御ボードである「VS-WRC051」には、ESP32-WROOM-32マイコンが搭載されています。 そのため、Arduino IDEを用いてメガローバーF120の制御プログラムを作成することができます。 製品付属のライブラリには、モータ制御関数や通信関数が含まれていますので、少ない開発負担で制御プログラムを作成することが可能です。
※VS-WRC051をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.9以上が動作する環境が必要です。

専用の無線コントローラで簡単操作
本製品に付属するゲームパッド型無線コントローラ「VS-C3」を使えば、PC等を接続しなくても、メガローバーF120を無線操縦することができます。 アナログスティックを使用して、前後左右全方向へ移動、回転させることができますので、手動操縦で動作させる際や、動作確認等にお使いいただけます。
機能を拡張するオプション
メガローバーF120には以下のオプションを取付けることが可能です。
- レーザーレンジファインダ
機体周囲の障害物等を検知するLRFを取り付ける、本体注文時の有償オプションです。 - 前後バンパー
壁等との衝突を検知できるバンパーセンサをロボットの前後に取り付ける、本体注文時の有償オプションです。 - 拡張機器用電源基板
Raspberry Pi 4B 2GB版やROS PCオプションなどの拡張機器を搭載した際に、メガローバーF120本体のバッテリーから電源を供給する、本体注文時の有償オプションです。 Raspberry Pi 4B 2GB版オプション搭載時および ROS PCオプション搭載時には必須となります。 - Raspberry Pi 4B 2GB版
Raspberry Pi 4B 2GB版を取り付けて出荷する、本体注文時の有償オプションです。拡張機器用電源基板オプションVS-WRC054が別途必要です。SDカードおよびOSイメージは付属しません。 - ワイヤレス充電
無線充電の機能を追加する、本体受注時の有償オプションです。本体後部への取り付けとなります。 - ROS PC
ROSで制御するための環境構築済みPCを取り付ける本体注文時の有償オプションです。拡張機器用電源基板オプションVS-WRC054が別途必要です。
ROS制御のイメージ(使用機体はメガローバーVer2.0です。)
02製品仕様
| 製品名 | メガローバーF120 |
|---|---|
| 価格(税抜) | オープン価格 |
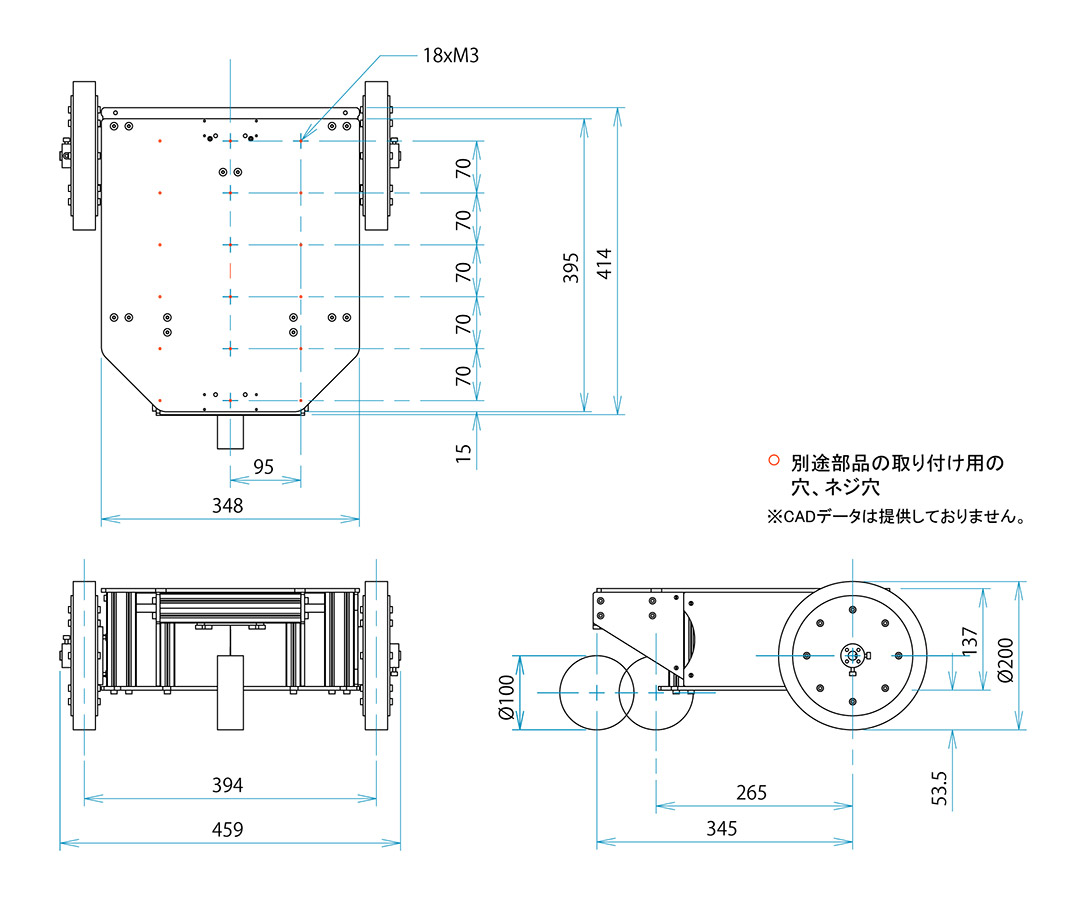
| 全長 | 459mm |
| 全幅 | 435mm |
| 全高 | 200mm |
| 本体重量 | 約33.2kg(標準品) |
| 積載重量 | 約120kg |
| 本体材質 | アルミニウム |
| 最高速度(実測値) | 1.2m/s |
| バッテリー | 24Vシール鉛 624Wh |
| 稼働時間(目安) | 約65時間 ※無積載で0.3m/s定速走行時 |
| 駆動方式 | 二輪駆動 後部キャスター×1 |
| タイヤ直径 | 駆動輪:200mm 従動輪:100mm |
| モーター | DCモーター 70W×2 |
| 回転検出 | エンコーダー |
| 制御基板 | VS-WRC051 |
| SDK | VS-WRC051用Arduinoライブラリ ROSパッケージ |
| 収録サンプル |
[Arduinoライブラリ] ・車輪制御 ・エンコーダ読み取り ・各種通信機能等 [ROS用サンプルコード] ・ゲームパッドからの操作 ・マウス(タッチパッド)からの操作 ・SLAM(gmapping) ・SLAM(cartographer) ・navigation ※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。 |
| インターフェース | USBシリアル、Wi-Fi、Bluetooth Classic、BLE |
| 付属品 | 充電器、無線操縦セット |
| 注文時オプション | レーザーレンジファインダー 前後バンパー 拡張機器用電源基板 Raspberry Pi 4B 2GB版 ワイヤレス充電 ROS PC |
| ご購入はこちら |
メガローバーF120 |
※製品の仕様は予告無く変更する場合がございます。

拡張用部材の搭載例
(追加工無し)
カスタマイズのご案内
研究開発用台車ロボットは、標準機では仕様を満たさない、別途機器を搭載して研究をしたいといった企業様向けに、ご要望に合わせたハードウェアのカスタマイスが可能です。カスタマイズにおける費用、納期については要件ごとに異なりますので、まずはお気軽にご相談ください。
お問い合わせはこちら
※なお、お客様独自のシステムに関する開発・サポートは行っておりません。
カスタマイズ事例
A社:稼働時間を長くするためにバッテリーを増設
B社:積載重量300㎏用にハードウェアの設計
C社:別途機器を搭載するための取り付け穴を天板に追加工
D社:別途機器を搭載するのためのやぐらの設計、取り付け
E社:オプション品のLRFではなくユーザーが指定するLRFを取り付け
F社:より強力なモーターへの変更
天板に関して、標準の穴以外にも製造上必要な場所を除くスペースであれば、追加でネジ穴などの加工が
可能です。
その他の加工形状につきましては、別途ご相談ください。
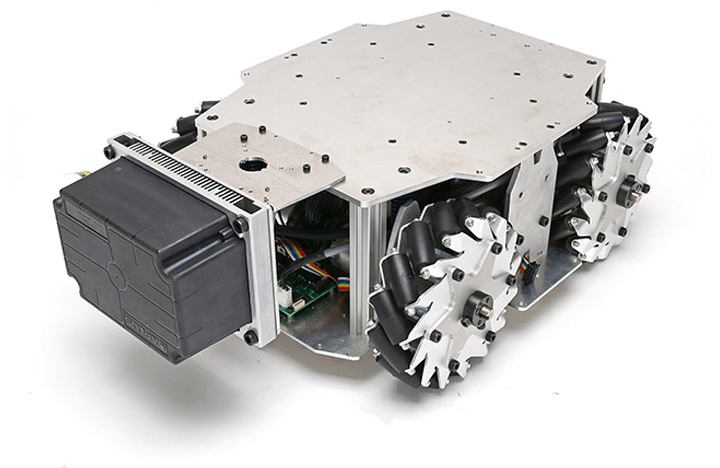
03ハードウェア構成
メカナムローバーG120

※製品の仕様は予告無く変更する場合がございますのでご了承ください。
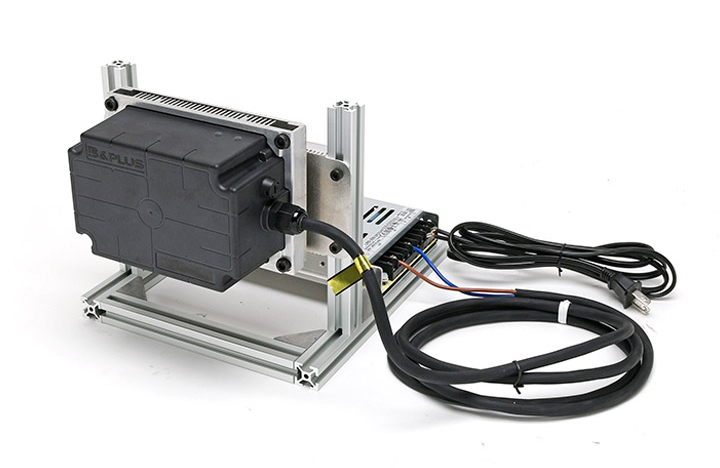
04ワイヤレス充電オプション
大型台車ロボット用 ワイヤレス充電オプション
弊社にて好評発売中の研究開発用台車ロボットシリーズは、通常の二輪タイプ、四輪メカナムホイール搭載タイプ、四輪ステアリング構造タイプなど、 様々な用途に適した豊富なバリエーションと、
研究・開発を行い やすいシンプルな制御系、十分な可搬重量といった特徴を備え、研究用途、開発用途のみならず、実用を見据えた実装試験などにも広く採用いただいています。
今回発売するワイヤレス充電オプションは、対応する研究開発用台車ロボットに対して無線での給電機能を追加する、注文時有償オプションです。
本製品を用いることで、これまで充電器に接続して行っていたバッテリーへの充電を無線化することができ、運用の効率化を図ることができるほか、
台車ロボットの自律動作プログラムの中に充電(充電器への帰還)を組み込むことによる可用性の向上、連続稼働時間の延長など、台車ロボットとしての活用の可能性そのものを大きく拡張することができます。
 |
 |
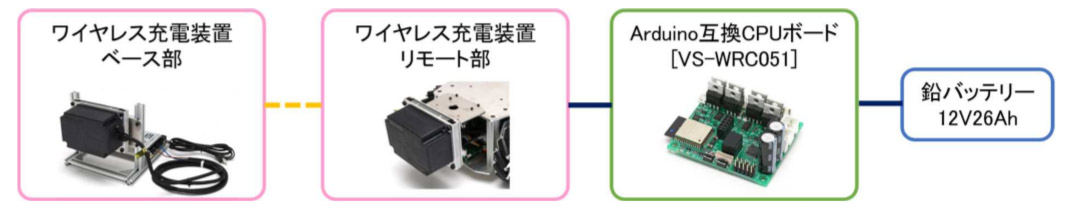
構成図
【本体仕様】
| 搭載機器 |
メガローバーVer2.1 メカナムローバーVer2.1 4WDSローバーVer2.1 |
メガローバーF120 メカナムローバーG120 |
|---|---|---|
| 充電電圧 (バッテリー電圧によって変動します) | 14.8V 以下 | 29.0V 以下 |
| 充電電流 (バッテリー電圧によって変動します) | 8.5A 以下 | 4.3A 以下 |
| 伝送距離 | 0~10mm | |
| 許容ずれ | ±4mm | |
※本製品は屋内専用です。屋外での使用は想定しておりません。
また、製品の仕様は予告なく変更となる場合があります
また、製品の仕様は予告なく変更となる場合があります
05有償サポートのご案内
研究開発用台車ロボットについて、メールでのサポート対応ではなく、 Webミーティングでのお打ち合わせによるサポートを提供いたします。 価格は30分あたりの単価となっておりますので、1時間をご希望の場合には2口のご注文をお願いいたします。
価格:30分 1万円(税別)
【詳細・お申し込みはこちら】
Arduinoは、Arduino AGの登録商標です。
Ubuntuは、Canonical Ltd.の商標または登録商標です。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
BluetoothRは、Bluetooth SIG, Inc. USAの商標または登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の商標または登録商標です。
