���C�X�g���������
01���d�ʖ�120kg���������� ���J�i�����[�o�[G120 ����
���d�ʖ�120kg�����������u���J�i�����[�o�[G120�v
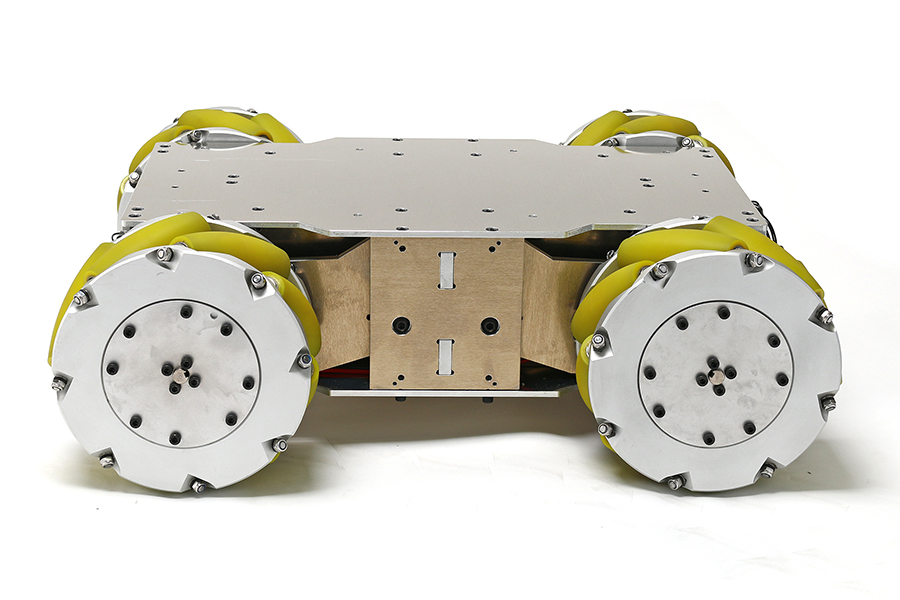
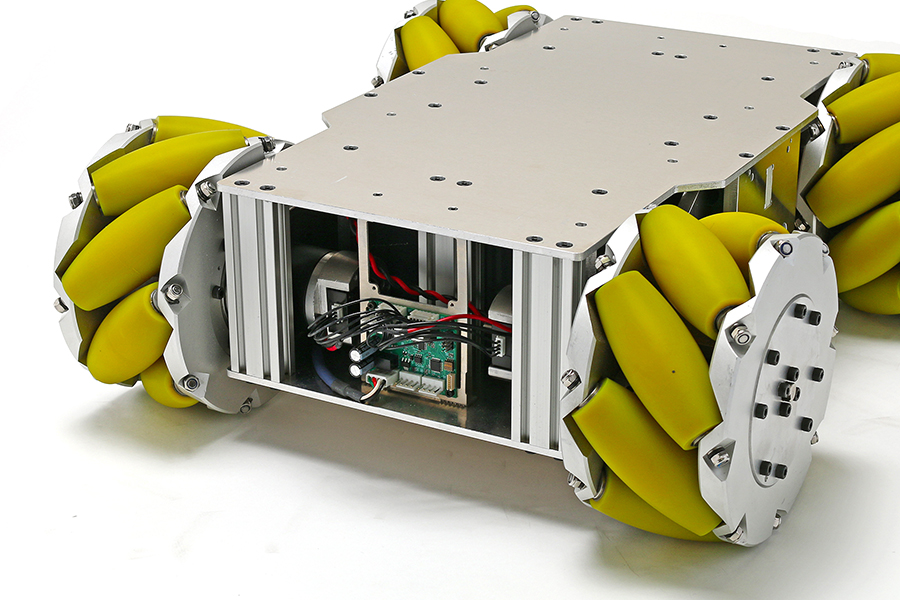
���J�i�����[�o�[G120�́A�D�]�������̃��J�i�����[�o�[�̎ԑ̍\�����x�[�X�ɂ��A�ԗցE���[�^�[�E�����E➑̍\���̑S�Ă��������A���d��120kg���������������X�^�[�}�V���ł��B ����^�̋@�̂ł���Ȃ���AArduinoIDE�Ή��AROS�Ή��Ƃ����������͂��̂܂ܔ����Ă��邽�߁A�l�X�Ȍ����A�J���p�r�ɕ��L���Ή����\�ł��B
 |
 |
 |
 |
���d�ʖ�120kg������
���J�i�����[�o�[G120�́A��^�̃z�C�[����[�^�[�𓋍ڂ��邱�Ƃɂ��A�V���[�Y�ő�̉��d�ʂ��������܂����B
��^��➑̂��������邽�߂Ɏԑ̍\����o�b�e���Ȃǂ��������A����܂łƕς��Ȃ��p����ڎw���Ă��܂��B
�������̕��А������J���p��ԃ��{�b�g�ɂ����Ă��A���d�ʂ�����^�Ȃ��̂Ƃ������Ƃ������N�G�X�g�𑽂����������Ă��܂����B
����̃��J�i�����[�o�[G120�͂����j�[�Y�ɉ�������̂ŁA����܂ł͕s�\�ł����������A�J���v���W�F�N�g�������̂��̂Ƃ��܂��B
 |
 |
���{���i�͏�p���Ӑ}���Đv���ꂽ���̂ł͂���܂���B�܂��A��^�̋@�̂̂��߁A�J����^�p�ɂ͏\���Ȓ��ӂ����肢�������܂��B
�l�փ��J�i���z�C�[���𓋍ڂ��A�S�����ֈړ����\
���J�i�����[�o�[G120�͒���^�̋@�̂ł���Ȃ���A���J�i���z�C�[���ɂ��S�����ւ̈ړ����\�ł��B
�ō����x�͎����l��1.3m/s�Ƃ��A�l�X�Ȍ����A�J���p�r�ɑΉ����邱�Ƃ��ł��܂��B
�X�e�A�����O�@�\���������ɕ����]��������A�@�̂̌�����ς����ɐ^���Ɉړ������肷�邱�Ƃ��ł��邽�߁A�O������̐��m�Ȉʒu���䂪�K�v�ȗp�r�Ȃǂɓ��ɓK���Ă��܂��B
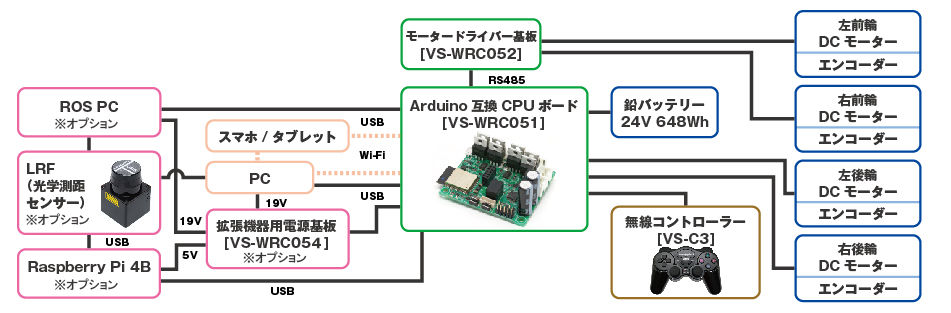
�L��/�����ڑ��ɂ�鐧��
���J�i�����[�o�[G120�́AWi-Fi / BLE / BluetoothClassic ��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B �w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�ŃR���g���[��
���J�i�����[�o�[G120�́AROS���b�Z�[�W�ʐM�ɑΉ����Ă��܂��B
ROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁAROS���g�������䂪�\�ƂȂ�܂��B
ROS���b�Z�[�W�ʐM���g�����ƂŁA���x�����ʂ̎w�ߒl���A�킸�����s�̃R�[�h�Ń��J�i�����[�o�[G120�ɑ��M���邱�Ƃ��ł��AROS���{�b�g�Ƃ��ĕ��L�����p���\�ł��B
�����h�L�������g�ƈȉ��̃T���v���v���O�������t�����邽�߁A���S�҂̕��ł��AROS���Ő���V�X�e�����쐬���A�ȒP�ɓ��������Ƃ��ł��܂��B
LRF�Ȃǂ̃Z���T��p�������x�Ȑ�����A���Ȃ��J�����S�Ŏ������邱�Ƃ��\�ł��B
ROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͌�q�̒ʂ�ł��B
�yROS�T���v���v���O�����ꗗ�z
- �Q�[���p�b�h����̑���
- �}�E�X�i�^�b�`�p�b�h�j����̑���
- SLAM�igmapping�j
- SLAM(cartographer)
- navigation
���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
��SLAM�Anavigation���s�����߂ɂ�LRF���K�v�ł��BLRF�I�v�V�����̂����p���֗��ł��B
�yROS�g�p���̐���������z
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 7200U | Core i5 8259U |
| ������ | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
| �X�g���[�W | SSD 128GB | M.2 SSD 256GB |
| �O���t�B�b�N | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
���L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
Arduino IDE�Ńv���O�����\
���J�i�����[�o�[G120�̐���{�[�h�ł���uVS-WRC051�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă��܂��B ���̂��߁AArduino IDE��p���ă��J�i�����[�o�[G120�̐���v���O�������쐬���邱�Ƃ��ł��܂��B ���i�t���̃��C�u�����ɂ́A���[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��\�ł��B
��VS-WRC051��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.9�ȏオ���삷������K�v�ł��B

��p�̖����R���g���[���ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���uVS-C3�v���g���APC����ڑ����Ȃ��Ă��A���J�i�����[�o�[G120�����c���邱�Ƃ��ł��܂��B �A�i���O�X�e�B�b�N���g�p���āA�O�㍶�E�S�����ֈړ��A��]�����邱�Ƃ��ł��܂��̂ŁA�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
�@�\���g������I�v�V����
���J�i�����[�o�[G120�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
���[�U�[����p���āA�@�̂̎��͂ɑ��݂����Q����ǂ̈ʒu�����擾���邱�Ƃ��ł��܂��B - �g���@��p�d�����
Raspberry Pi 3B��ROS PC�I�v�V�����Ȃǂ̊g���@��𓋍ڂ����ۂɁA���J�i�����[�o�[G120�{�̂̃o�b�e���[����d������������A�{�̒������̗L���I�v�V�����ł��B Raspberry Pi3B�I�v�V�������ڎ������ ROS PC�I�v�V�������ڎ��ɂ͕K�{�ƂȂ�܂��B - Raspberry Pi 3B
VS-WRC051����d���������邱�Ƃ��ł��A����R���s���[�^�Ƃ��Ďg�p���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B - ROS PC
ROS�Ő��䂷�邽�߂̊��\�z�ς�PC�����t����{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��B
ROS����̃C���[�W�i�g�p�@�̂̓��K���[�o�[Ver2.0�ł��B�j
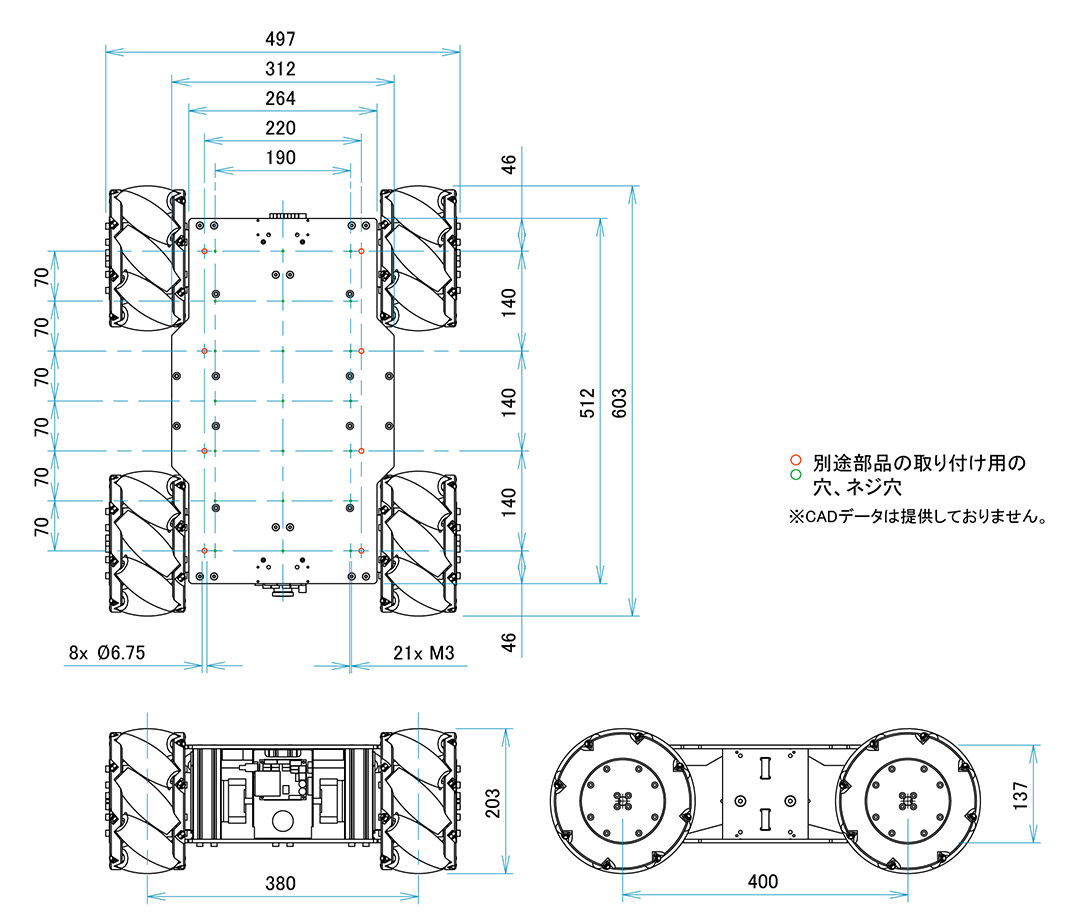
02���i�d�l
| ���i�� | ���J�i�����[�o�[G120 |
|---|---|
| ���i�i�Ŕ��j | �I�[�v�����i |
| �S�� | 592mm |
| �S�� | 497mm |
| �S�� | 203mm |
| �{�̏d�� | ��70kg |
| �ύڏd�� | ��120kg |
| �{�̍ގ� | �A���~�j�E�� | �@
| �ō����x�i�����l�j | 1.3m/s |
| �o�b�e���[ | 24V�V�[�����@312Wh |
| �쓮�����i�ڈ��p | �l�쓮���J�i���z�C�[�� �T�X�y���V���� |
| �^�C�����a | 203mm |
| ���[�^�[ | DC���[�^�@70W�~4 |
| ��]���o | �G���R�[�_�[ |
| ������ | VS-WRC051 |
| SDK | VS-WRC051�pArduino���C�u���� ROS�p�b�P�[�W |
| ���^�T���v�� |
[Arduino���C�u����] �E�ԗ��� �E�G���R�[�_�ǂݎ�� �E�e��ʐM�@�\�� [ROS�p�T���v���R�[�h] �E�Q�[���p�b�h����̑��� �E�}�E�X�i�^�b�`�p�b�h�j����̑��� �ESLAM�igmapping�j �ESLAM(cartographer) �Enavigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B |
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�ABluetooth Classic�ABLE |
| �t���i | �[�d��A�������c�Z�b�g |
| �������I�v�V���� | ���[�U�[�����W�t�@�C���_�[ �g���@��p�d����� Raspberry Pi 3B ���C�����X�[�d ROS PC |
| ���w���͂����� |
���J�i�����[�o�[G120 |
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��B

�g���p���ނ̓��ڗ�
(�lj��H����)
�J�X�^�}�C�Y�̂��ē�
�����J���p��ԃ��{�b�g�́A�W���@�ł͎d�l�����Ȃ��A�ʓr�@��𓋍ڂ��Č������������Ƃ�������Ɨl�����ɁA���v�]�ɍ��킹���n�[�h�E�F�A�̃J�X�^�}�C�X���\�ł��B�J�X�^�}�C�Y�ɂ������p�A�[���ɂ��Ă͗v�����ƂɈقȂ�܂��̂ŁA�܂��͂��C�y�ɂ����k���������B
���₢���킹�͂�����
���Ȃ��A���q�l�Ǝ��̃V�X�e���Ɋւ���J���E�T�|�[�g�͍s���Ă���܂���B
�J�X�^�}�C�Y����
A�ЁF�ғ����Ԃ����邽�߂Ƀo�b�e���[��
B�ЁF�ύڏd��300�s�p�Ƀn�[�h�E�F�A�̐v
C�ЁF�ʓr�@��𓋍ڂ��邽�߂̎��t������V�ɒlj��H
D�ЁF�ʓr�@��𓋍ڂ���̂��߂̂₮��̐v�A���t��
E�ЁF�I�v�V�����i��LRF�ł͂Ȃ����[�U�[���w�肷��LRF�����t��
F�ЁF��苭�͂ȃ��[�^�[�ւ̕ύX
�V�Ɋւ��āA�W���̌��ȊO�ɂ�������K�v�ȏꏊ�������X�y�[�X�ł���A�lj��Ńl�W���Ȃǂ̉��H��
�\�ł��B
���̑��̉��H�`��ɂ��܂��ẮA�ʓr�����k���������B
03�n�[�h�E�F�A�\��
���J�i�����[�o�[G120
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
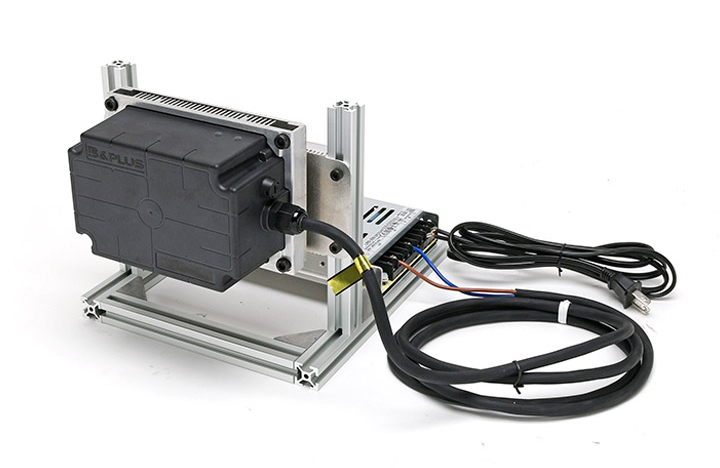
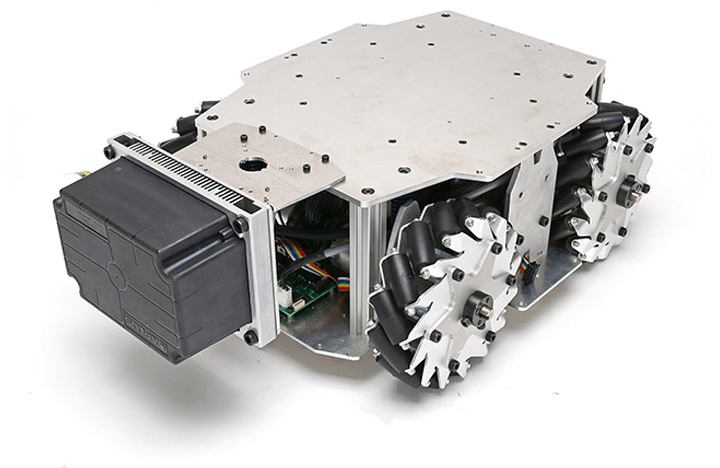
04���C�����X�[�d�I�v�V����
��^��ԃ��{�b�g�p ���C�����X�[�d�I�v�V����
���ЂɂčD�]�������̌����J���p��ԃ��{�b�g�V���[�Y�́A�ʏ�̓�փ^�C�v�A�l�փ��J�i���z�C�[�����ڃ^�C�v�A�l�փX�e�A�����O�\���^�C�v�ȂǁA �l�X�ȗp�r�ɓK�����L�x�ȃo���G�[�V�����ƁA
�����E�J�����s�� �₷���V���v���Ȑ���n�A�\���ȉ��d�ʂƂ���������������A�����p�r�A�J���p�r�݂̂Ȃ炸�A���p�������������������Ȃǂɂ��L���̗p���������Ă��܂��B
�������郏�C�����X�[�d�I�v�V�����́A�Ή����錤���J���p��ԃ��{�b�g�ɑ��Ė����ł̋��d�@�\��lj�����A�������L���I�v�V�����ł��B
�{���i��p���邱�ƂŁA����܂ŏ[�d��ɐڑ����čs���Ă����o�b�e���[�ւ̏[�d�������邱�Ƃ��ł��A�^�p�̌�������}�邱�Ƃ��ł���ق��A
��ԃ��{�b�g�̎�������v���O�����̒��ɏ[�d�i�[�d��ւ̋A�ҁj��g�ݍ��ނ��Ƃɂ��p���̌���A�A���ғ����Ԃ̉����ȂǁA��ԃ��{�b�g�Ƃ��Ă̊��p�̉\�����̂��̂�傫���g�����邱�Ƃ��ł��܂��B
 |
 |
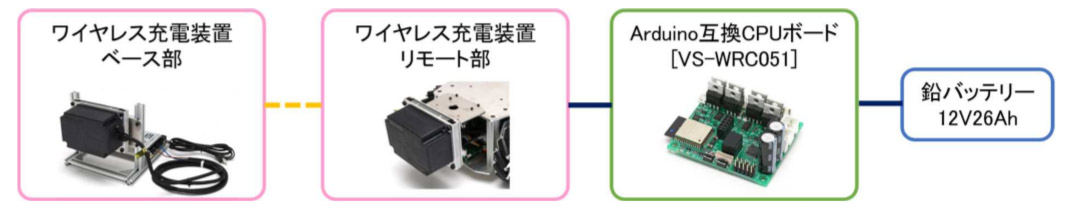
�\���}
�y�{�̎d�l�z
| ���ڋ@�� |
���K���[�o�[Ver2.1 ���J�i�����[�o�[Ver2.1 4WDS���[�o�[Ver2.1 |
���K���[�o�[F120 ���J�i�����[�o�[G120 |
|---|---|---|
| �[�d�d�� �i�o�b�e���[�d���ɂ���ĕϓ����܂��j | 14.8V �ȉ� | 29.0V �ȉ� |
| �[�d�d�� �i�o�b�e���[�d���ɂ���ĕϓ����܂��j | 8.5A �ȉ� | 4.3A �ȉ� |
| �`������ | 0�`10mm | |
| ���e���� | �}4mm | |
���{���i�͉�����p�ł��B���O�ł̎g�p�͑z�肵�Ă���܂���B
�܂��A���i�̎d�l�͗\���Ȃ��ύX�ƂȂ�ꍇ������܂�
�܂��A���i�̎d�l�͗\���Ȃ��ύX�ƂȂ�ꍇ������܂�
05�L���T�|�[�g�̂��ē�
�����J���p��ԃ��{�b�g�ɂ��āA���[���ł̃T�|�[�g�Ή��ł͂Ȃ��A Web�~�[�e�B���O�ł̂��ł����킹�ɂ��T�|�[�g��������܂��B ���i��30��������̒P���ƂȂ��Ă���܂��̂ŁA1���Ԃ�����]�̏ꍇ�ɂ�2���̂����������肢�������܂��B
���i�F30�� 1���~�i�ŕʁj
�y�ڍׁE���\�����݂͂�����z
Arduino�́AArduino AG�̓o�^���W�ł��B
Ubuntu�́ACanonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̏��W�܂��͓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
