���C�X�g���������
LINEUP��ԃ��{�b�gVer.2.1�V���[�Y
 |
 |
 |
 |
||
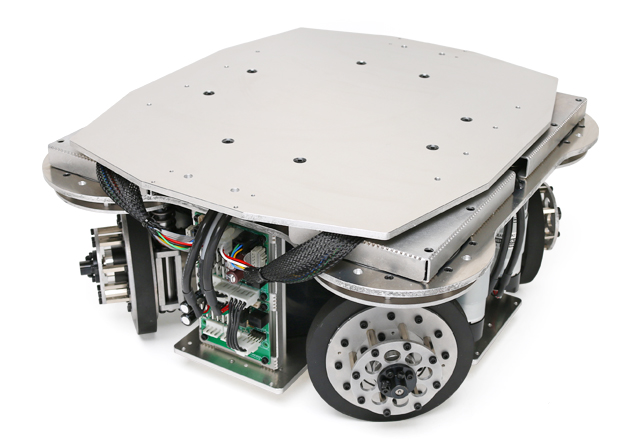
01��쓮��^��ԃ��{�b�g ���K���[�o�[Ver2.1
���K���[�o�[Ver2.1�́A���d�ʖ�40kg���������������J���p��ԃ��{�b�g�̃x�[�V�b�N���f���ł��B
�A���~�t���[�����̗p�����y�ʁE�������Ȏԑ̂ƁAArduinoIDE�ł̃v���O�����쐬��ROS�ł̐���ɑΉ�����J���e�Ր�������A�����A�J���p�̃x�[�X���{�b�g�Ƃ��āA�܂��A������ԂƂ��Ă̊��p�ȂǁA�L�͈͂ȗp�r�ɑΉ��ł��܂��B
����A�������̃��K���[�o�[Ver2.0�ɑ��āA���[�U����̃t�B�[�h�o�b�N�̔��f�A�M�����̂���Ȃ����Ȃǂ������AVer2.1�Ƃ��ăA�b�v�f�[�g���s���܂����B
ROS�Ή���L�x�ȃI�v�V�����̐ݒ�ȂǁA�������i�̃����b�g�͂��̂܂܂ɁA����ɂ����ꂽ�g���S�n�����肵�Ď������܂��B
 |
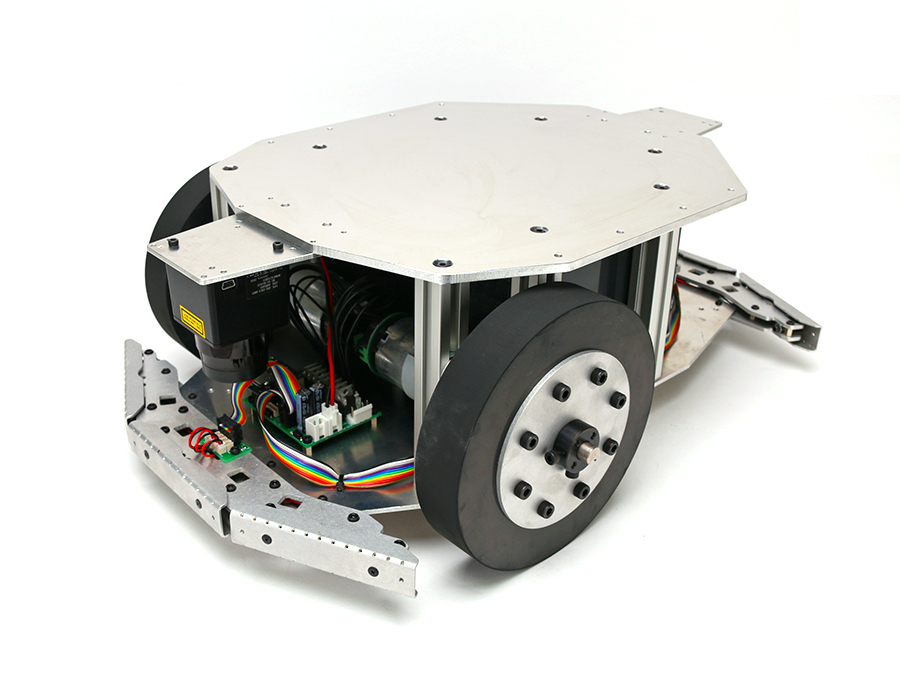 |
��쓮�̑�^��ԃ��{�b�g
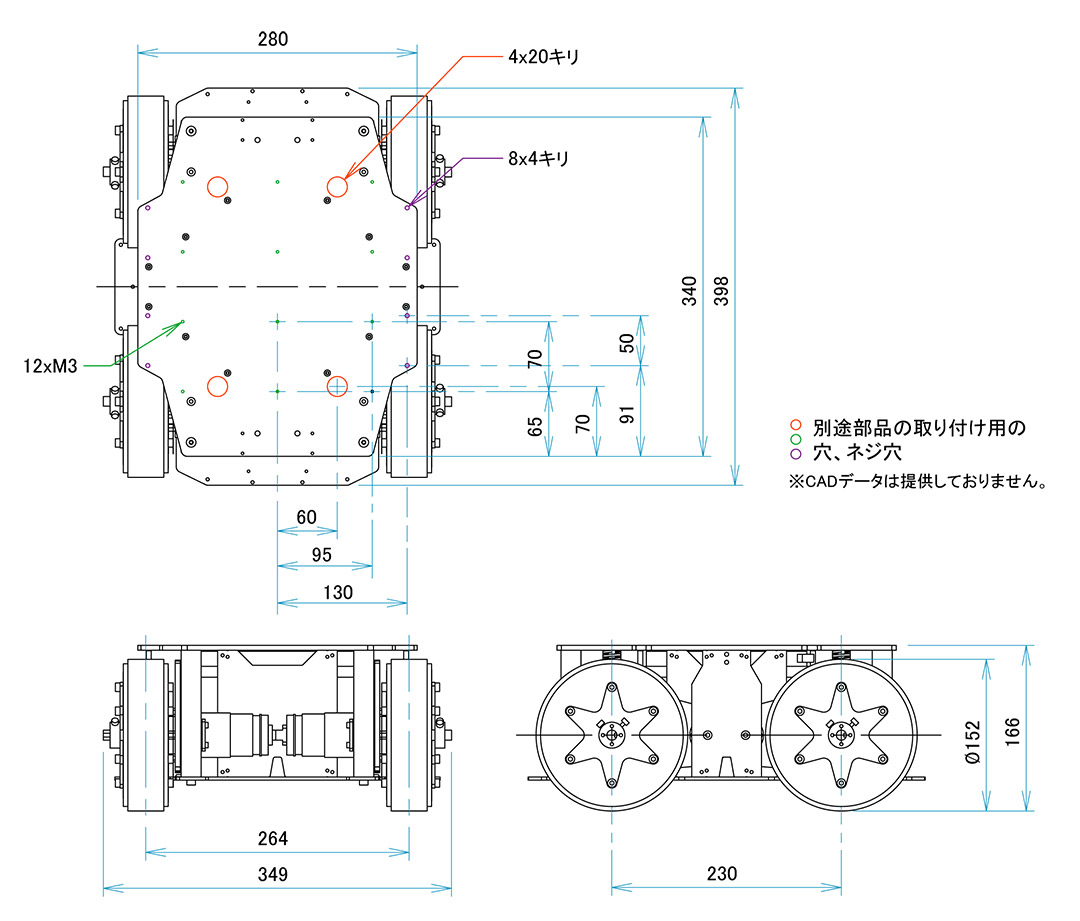
���K���[�o�[Ver2.1�́A��쓮�ɃL���X�^�[���������ԗ֍\���ƂȂ��Ă��邽�߁A�V���v���Ȑ���ŋ쓮�����邱�Ƃ��ł��܂��B
�쓮�ւɂ͒ʏ�̎ԗւ��̗p���Ă��邽�߁A�S���ʈړ��@�\������ԃ��{�b�g�Ɣ�r����ƁA�ϋv����Ïl���Ƃ������_�ŗL���Ȃق��A�����肵�ɂ����ȂǁA���p��ʂɓK��������������Ă��܂��B
���K���[�o�[Ver2.1�́A���d�ʖ�40kg�A�ō����x1.4m/s�ŁA�l�X�ȗp�r�̌����E�J���ړI�ɗ]�T�������đΉ����\�ł��B��Ƃ�̂�����d�ʂ��A���x�Ȑ���pPC�̓��ڂ���p�r��ړI�Ƃ����e��@��̓��ڂ��������܂��B
�o�b�e���[�ɂ��ғ����Ԃ͖�25���ԁi���j�ŁA���ʂȎ����p�r�ł̒����ԋ쓮���\�Ƃ��܂��B
���o�b�e���[�쓮���Ԃɂ��ẮA�W���I�Ȋ����ł̐v�l�ł��B���p�̏ɂ���āA�o�b�e���[�쓮���Ԃ͑傫���قȂ�܂��B
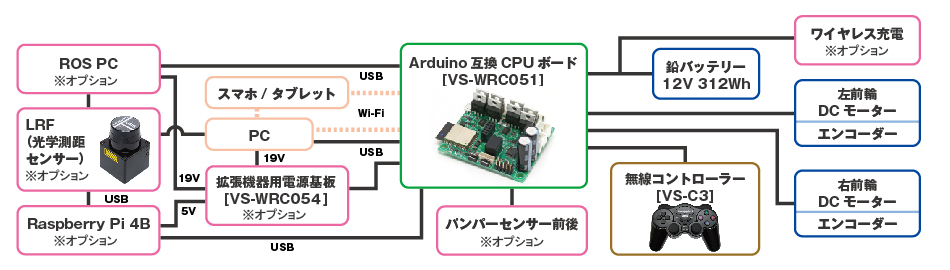
�L��/�����ڑ��ɂ�鐧��
���K���[�o�[Ver2.1�́AWi-Fi / BLE / BluetoothClassic ��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B �w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�ŃR���g���[��
���K���[�o�[Ver2.1�́AROS���b�Z�[�W�ʐM�ɑΉ����Ă��܂��B
ROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁAROS���g�������䂪�\�ƂȂ�܂��B
ROS���b�Z�[�W�ʐM���g�����ƂŁA���x�����ʂ̎w�ߒl���A�킸�����s�̃R�[�h�Ń��K���[�o�[Ver2.1�ɑ��M���邱�Ƃ��ł��AROS���{�b�g�Ƃ��ĕ��L�����p���\�ł��B
�����h�L�������g�ƈȉ��̃T���v���v���O�������t�����邽�߁A���S�҂̕��ł��AROS���Ő���V�X�e�����쐬���A�ȒP�ɓ��������Ƃ��ł��܂��B
LRF�Ȃǂ̃Z���T��p�������x�Ȑ�����A���Ȃ��J�����S�Ŏ������邱�Ƃ��\�ł��B
ROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͌�q�̒ʂ�ł��B
�yROS�T���v���v���O�����ꗗ�z
- �Q�[���p�b�h����̑���
- �}�E�X�i�^�b�`�p�b�h�j����̑���
- SLAM�igmapping�j
- SLAM(cartographer)
- navigation
���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
��SLAM�Anavigation���s�����߂ɂ�LRF���K�v�ł��BLRF�I�v�V�����̂����p���֗��ł��B
�yROS�g�p���̐���������z
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 7200U | Core i5 8259U |
| ������ | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
| �X�g���[�W | SSD 128GB | M.2 SSD 256GB |
| �O���t�B�b�N | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
���L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
Arduino IDE�Ńv���O�����\
���K���[�o�[Ver2.1�̐���{�[�h�ł���uVS-WRC051�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă��܂��B ���̂��߁AArduino IDE��p���ă��K���[�o�[Ver2.1�̐���v���O�������쐬���邱�Ƃ��ł��܂��B ���i�t���̃��C�u�����ɂ́A���[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��\�ł��B
��VS-WRC051��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.9�ȏオ���삷������K�v�ł��B

��p�̖����R���g���[���[�ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���[�uVS-C3�v���g���APC����ڑ����Ȃ��Ă��A���K���[�o�[Ver2.1�����c���邱�Ƃ��ł��܂��B �A�i���O�X�e�B�b�N���g�p���āA�O��ֈړ��A��]�����邱�Ƃ��ł��܂��̂ŁA�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
���K���[�o�[Ver2.0����̕ύX�_
- �d�������H�̒lj�
���[�^�[�d�������H��lj����邱�ƂŁA���ׂ��Ȑ��䂪�ł���悤�ɂȂ�A�ߕ��ׂɂ������Ȃ�܂����B - �ʐM�o�H�̑m�C�Y���\����
�{�̓��̒ʐM�o�H�ɂ��āA�m�C�Y���\�����コ���܂����B�^�p�̈��萫���オ�����߂܂��B
�@�\���g������I�v�V����
���K���[�o�[Ver2.1�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
�@�̎��͂̏�Q���������m����LRF�����t����A�{�̒������̗L���I�v�V�����ł��B - �O��o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O��Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �g���@��p�d�����
Raspberry Pi 4B 2GB�ł�ROS PC�I�v�V�����Ȃǂ̊g���@��𓋍ڂ����ۂɁA���K���[�o�[�{�̂̃o�b�e���[����d������������A�{�̒������̗L���I�v�V�����ł��B Raspberry Pi 4B 2GB�ŃI�v�V�������ڎ������ ROS PC�I�v�V�������ڎ��ɂ͕K�{�ƂȂ�܂��B - Raspberry Pi 4B 2GB��
Raspberry Pi 4B 2GB�ł����t���ďo�ׂ���A�{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��BSD�J�[�h�����OS�C���[�W�͕t�����܂���B - ����~�X�C�b�`�I�v�V����
��Ԗ{�̂̌�ɔ���~�X�C�b�`�����t���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B - ROS PC
ROS�Ő��䂷�邽�߂̊��\�z�ς�PC�����t����{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��B
�y���p����z
�����w���H�w�� �c�茤����
�����e�[�}�F�����ȃZ���T�ɂ�鎩���^�]�����n�}����
�c�茤�����ł́A�ԍډ\�Ȉ����ȃZ���T�Œn�}�������s���������s���Ă��܂��B
�����^�]�Ԃ͒n�}�𗘗p���Ȃ��ƃX���[�Y�ȓ����͂ł��܂��A�n�}�̐����R�X�g�͂ƂĂ������Ƃ�����肪����܂��B
�����ȃZ���T�ł̒n�}�����@�\�̊ȈՃe�X�g�Ƃ��āA�������ʂ������^�]�p�\�t�g�E�F�AAutoware�ɑg���݁A
Autoware���烁�K���[�o�[�𐧌䂵�܂����B

ROS����̃C���[�W�i�g�p�@�̂̓��K���[�o�[Ver2.0�ł��B�j
01-2�u���K���[�o�[Ver2.1�v�̃����^���T�[�r�X���J�n

����A����܂Ń����^���T�[�r�X�����{���Ă����u���K���[�o�[Ver2.0�v�ɑウ�A�V���[�Y�ŐV�łł���u���K���[�o�[Ver2.1�v�̃����^�����J�n�������܂��BArduino IDE�ł̊J����ROS�ł̐���ȂǁA��舵�����ɗD�ꂽ���K���[�o�[Ver2.0�̓����͐������A�����肵���ғ����������܂��B���K���[�o�[Ver2.0�ŊJ�������\�t�g�E�F�A�́A��{�I�ɂ͂��̂܂܃��K���[�o�[Ver2.1�Ɉ����p���܂��̂ŁA�v���W�F�N�g�̃X���[�Y�Ȑi�s��W���܂���B
�{�T�[�r�X�𗘗p�����������Ƃɂ��A���v�����܂��Ă���������{�b�g�⎩������E�I�[�g���[�V�������{�b�g�ȂǁA����̏d�v�ȎЉ�C���t���ƂȂ肤�郍�{�b�g�̌����E�J�����X���[�Y�Ɏn�߂邱�Ƃ��\�ł��B���i���^�ԉ^�����{�b�g�A�q�ɂȂǂł̎����A���̌����E�J���ȂǁA�l�X�ȗp�r�ɑΉ��ł���_�������Ă��܂��B
�Ȃ��A���K���[�o�[Ver2.1�����^���T�[�r�X�̃R�[�X�ݒ�ɂ��ẮA���K���[�o�[Ver2.0�P���Ă���A���q�l�̂��茳�ł̖{�̉����ȂǁA�e������ɂ��ύX�͂���܂���B�܂��A���łɃ��K���[�o�[Ver2.0�������^������Ă��邨�q�l�́A���K���[�o�[Ver2.1�ւ̋@��ύX�ɂ��ẮA���ВS���܂ł����k���������B
| ��� | �@�̎d�l | �����^������ �� | �Q�l�����^����p�i�ŕʁj �� | ���[�U�[�ł̋@�̉��� |
|---|---|---|---|---|
| �Z�������^�� | ���K���[�o�[Ver2.1 �ʏ�@�� |
10���� | 5,000�~/�� | �s�� |
| ���������^��A | ���K���[�o�[Ver2.1 �ʏ�@�� |
6�����` | ����6�����F40,000�~/�� �_�����F20,000�~/�� |
�� |
| ���������^��B | ���K���[�o�[Ver2.1 �o���p�[�Z���T�[�ALRF�����@�� |
6�����` | ����6�����F60,000�~/�� �_�����F25,000�~/�� |
�� |
�����������^���ɂ����郌���^�����Ԃɂ��ẮA���v�]�ɉ����Ē����\�ł��B
�܂��A�����^����p�̓����^�����Ԃɂ��ϓ����܂��B�ڂ����͂��₢���킹���������B
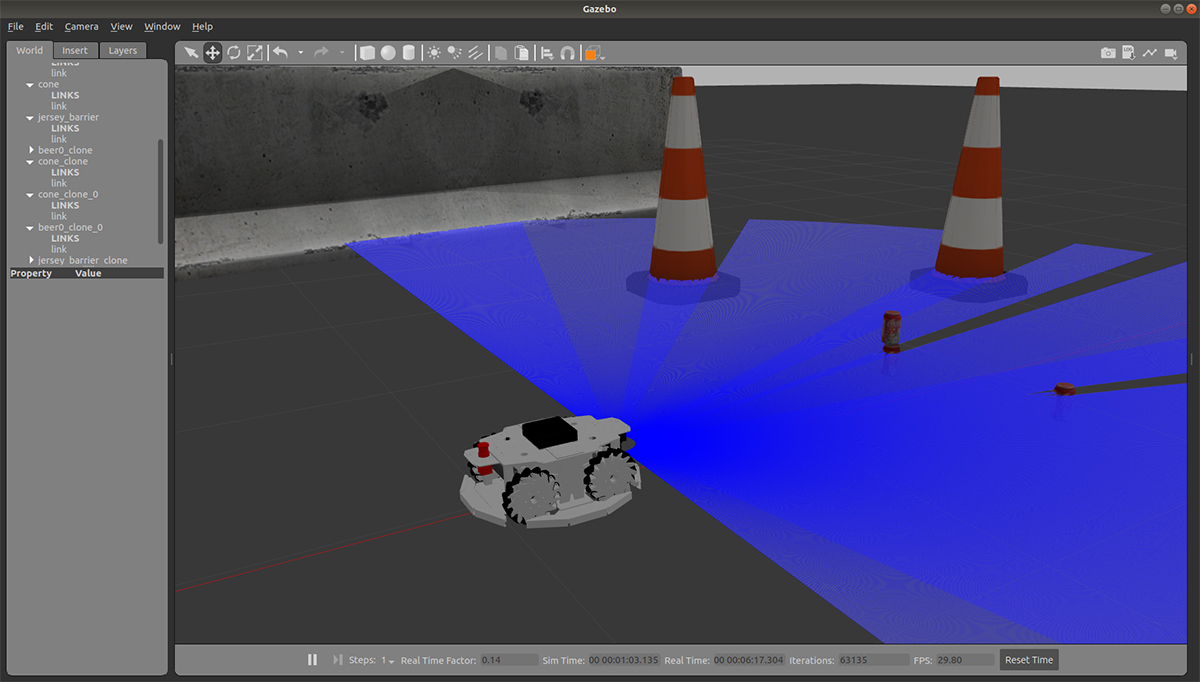
01-3ROS�Ή�3D�V�~�����[�^�[���f�� ���K���[�o�[�� �z�z�J�n
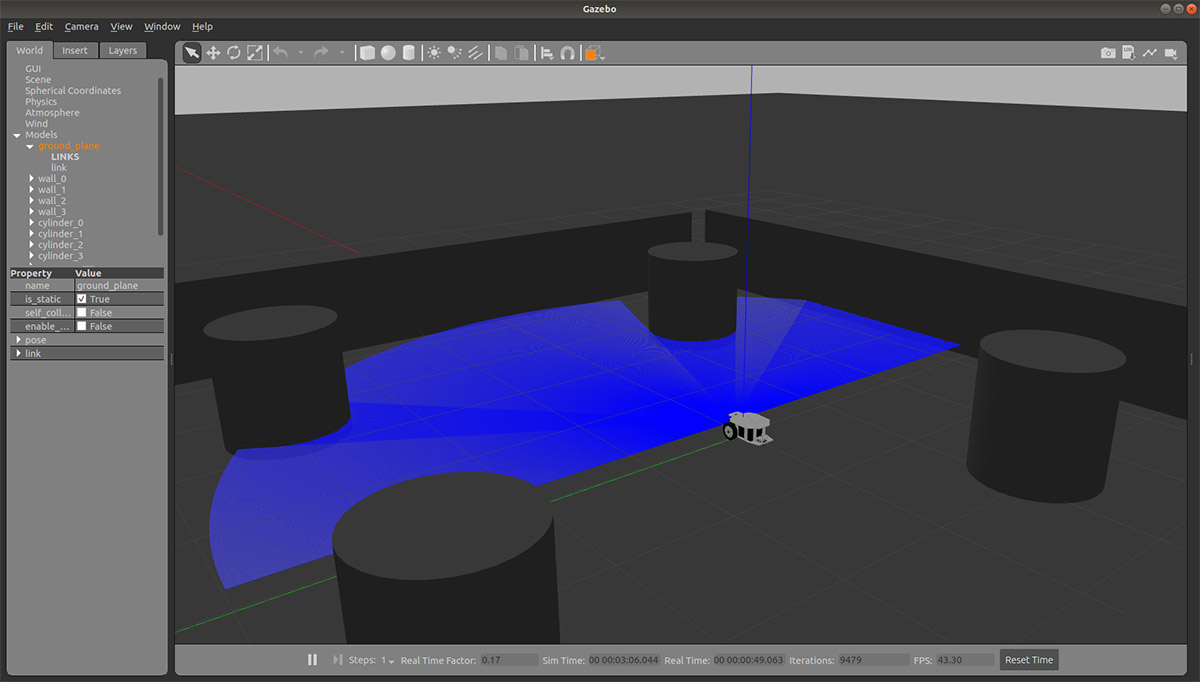
�D�]�������̃��K���[�o�[�́A���d�ʖ�40kg�̑�^➑̂ɉ����AROS�Ή���Arduino�݊��̐���{�[�h��A�L�x�Ȓ������L���I�v�V�����Ȃǂ̓���������Ă���A���Ђ̌����J���p��ԃ��{�b�g�̒��j���f���Ƃ��āA�l�X�ȗp�r�Ɋ��p���������Ă��܂��B���K���[�o�[�ɂ����ẮAROS�ł̃v���O�����J�����s���邽�߁A�l�X�Ȋ��E�p�r�ɍ��킹���^�p���ł��锽�ʁA��^�̋@�̂ł��邱�Ƃ���A����v���O�����̊J���ƌ��Ɉ��̋�Ԃ⓮���̈��S�m�F���K�v�ƂȂ�_���A�v���O�����J����̈�̃l�b�N�ƂȂ��Ă��܂����B���̂��єz�z���J�n����ROS�Ή�3D�V�~�����[�^�[���f�� ���K���[�o�[�ł́A�I�[�v���\�[�X��3D�V�~�����[�^�[�ł���uGazebo�v�ɑΉ��������f���t�@�C���ŁAGazebo��ʼn��z�I�Ƀ��K���[�o�[�삳���邱�Ƃ��\�ł��B����ɂ��AROS�v���O�����̓���m�F�⌟�����K���[�o�[�̎��@���Ȃ��Ƃ����s�ł���ق��A��^��ԃ��{�b�g�����ۂɓ��삳����O�ɃV�~�����[�^�[��ň��S�m�F���s�������Ƃ������p�r�ɂ����p�ł��܂��B
�yROS�Ή�3D�V�~�����[�^�[���f�� ���K���[�o�[�Łz
3D�V�~�����[�^�[���ŁA���S����y�ɓ���m�F���\
����܂ŁA���K���[�o�[�̓���m�F���ɂ͕K�����@��p����K�v������A���쎞�̎��͂̈��S�m�F�A�o�b�e���[�̏[�d�Ǘ��A�ғ����̓���Ď��ȂǁA��^��ԃ��{�b�g�Ȃ�ł͂̎�舵����̒��ӓ_����������܂����B �{���f����p����ƁA3D�V�~�����[�^�[��Gazebo��Ń��K���[�o�[�����z�I�ɓ��삳���邱�Ƃ��\�ƂȂ�܂��B ���̂��߁A��{�I�ȃv���O��������m�F���V�~�����[�^�[��ōs���A�v���O�������e�̃u���b�V���A�b�v���ς܂����̂��ɁA���@�œ���m�F���s���Ƃ����J���H���ނ��Ƃ��ł��܂��B �V�~�����[�^�[��ł̓�����e�͎��@�Ɗ��S�Ɉ�v������̂ł͂Ȃ����߁A���@�ł̓���m�F�͕K�v�ƂȂ�܂����A�J���H���S�̂Ŏ��@���������炷���Ƃ��ł��A����v���O�����쐬�̏ȗ͉��Ɋ�^���܂��B
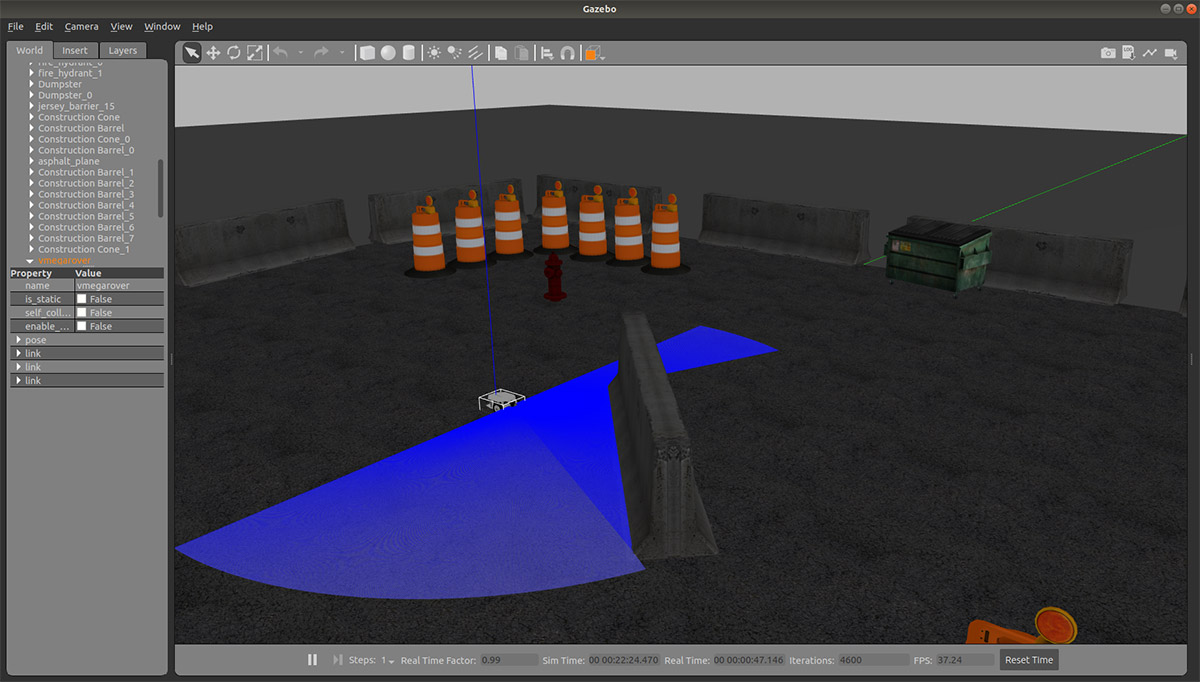
�v���O�����쐬���̖��蕪���c�[���Ƃ��Ċ��p�\
��ԃ��{�b�g�̃v���O�����쐬�ɂ����āu���{�b�g�����܂������Ȃ��v���̎��ۂ��������鎞�A���̌������v���O�����N���ł��邩�A�n�[�h�E�F�A�N���ł��邩�A���邢�̓��{�b�g�P�̖̂��ł͂Ȃ��l�b�g���[�N�⑼�f�o�C�X�Ƃ̐ڑ����ł��邩�ȂǁA�����ӏ��̉\��������ɂ킽��A���肪����ł���ꍇ������܂��B �{���f����p����ƁA�V�~�����[�^�[��Ńv���O���������s���邱�Ƃɂ��A���z�I�ȏ�Ԃł̃v���O�������s���ʂ��m�F���邱�Ƃ��ł��܂��B�����������s���ނ��ƂŁA��肪�ǂ��Ŕ������Ă��邩��c�����邱�Ƃ��A���v���ɂȂ邱�Ƃ����҂ł��܂��B
�V�~�����[�^�[�̃��f���͓Ǝ��Ɋg�����\
�{���f���̓��K���[�o�[�̕W���@�̂��V�~�����[�V�������Ă��܂����A���[�U�[�̎茳�Ń��f���̒lj���ҏW���\�ł��B ���g�p�̊��ɍ��킹���V�~�����[�V�����̏������s���Ă����������ƂŁA���[�U�[���ňقȂ铮����ł̃V�~�����[�V���������s���邱�Ƃ��ł��A���s���ʂ̗L�p�������܂�܂��B
���{�b�g�{�̂��茳�ɂȂ��Ă��V�~�����[�V���������s�\
�{���f���̓V�~�����[�^�[���Ŋ������ė��p�ł��A���K���[�o�[�{�͕̂K�v����܂���B���̂��ߕ����l�Ń��{�b�g�{�̂��V�F�A���ĊJ����i�߂�ꍇ�Ȃǂɂ����Ă��A�������̗ǂ��v���W�F�N�g�̐i�s�Ɋ�^���܂��B ���K���[�o�[��ROS���{�b�g����p�̋��ނƂ��Ċ��p����Ƃ������V�[����A���K���[�o�[�w���O�̓���m�F�Ƃ������p�r�ɂ����v���܂��B


�������ӂ���������
�{���f���́A3D�V�~�����[�^�[�uGazebo�v��Ń��K���[�o�[�̊�{�I�ȓ���m�F���s�����Ƃ�ړI�Ƃ��Ă��܂��BGazebo�̔\�͂���V�~�����[�V�����ɂ͑Ή��ł��Ȃ��ق��A�����Ɏ��@�Ɠ����������V�~�����[�V�������邱�Ƃ�ړI�Ƃ������̂ł͂���܂���B�ŏI�I�ȓ���m�F�͎��@�̃��K���[�o�[���g�����Ƃ������������܂��B���ɁA���C�W���ɂ��Ă͌����Ɏ�������Ă��܂���̂ŁA�d�ʕ��𓋍ڂ����ꍇ�̃V�~�����[�V�����Ȃǂɂ��ẮA�����Ƃ̍��ق��傫���Ȃ�\��������܂��B�܂��AROS�Ή�3D�V�~�����[�^�[���f�� ���K���[�o�[�łƂ��Ĕz�z�������̂́A�����܂ŃV�~�����[�^�[�p�̃��f���t�@�C���Ƃ���ɕt��������݂̂ƂȂ��Ă��܂��B���K���[�o�[�̎��@�Ɋւ�����́A�{���f���ɕt�����Ă͒���܂���B
01-4�M�A��ύX�I�v�V�����i��֔Łj����

���ڂ��郂�[�^�[�̃M�A���ύX�ł���A���K���[�o�[Ver2.1�{�̂��������̗L���I�v�V�����ł��B�ʏ�� 32.5�F1 �ł���M�A�䂪 71.2�F1 �ɕύX����A�ᑬ���̋������萫��ʒu����̐��x���オ�����߂܂��B
�Ȃ��{�I�v�V�����́A���t����M�A�h���[�^�[�̎�ނ�ύX���邱�Ƃɂ��������Ă��܂��B�ʏ�̃��[�^�[�Ɩ{�I�v�V�����p�̃��[�^�[�̍��݂�ʓY�ł̔[�i�A�[�i��ɂ��q�l�ɂăM�A���ύX���邱�Ƃɂ͑Ή����Ă��܂���B�܂��A�M�A�h���[�^�[�̏o�̓g���N�ɂ��ẮA��������ɂ��傫���قȂ邽�߁A���i�d�l�Ƃ��Ă͖������Ă���܂���B
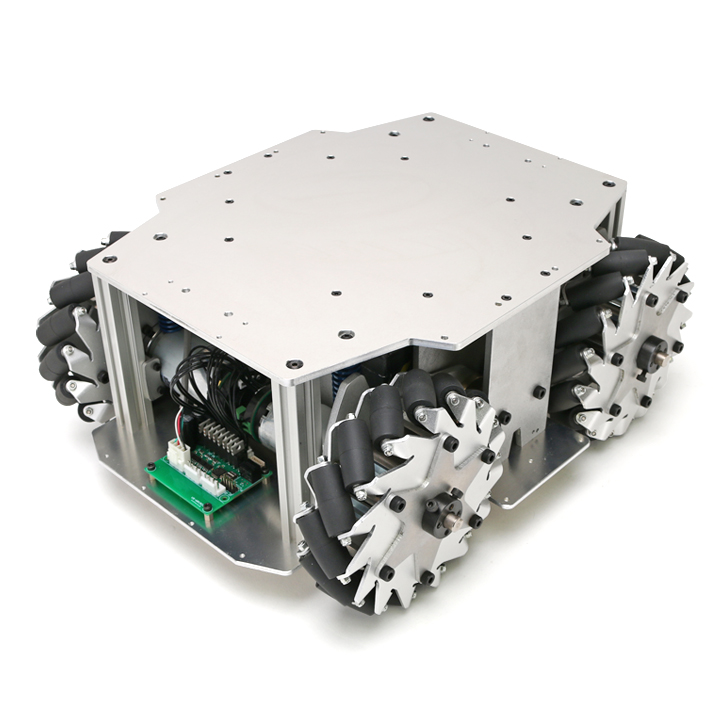
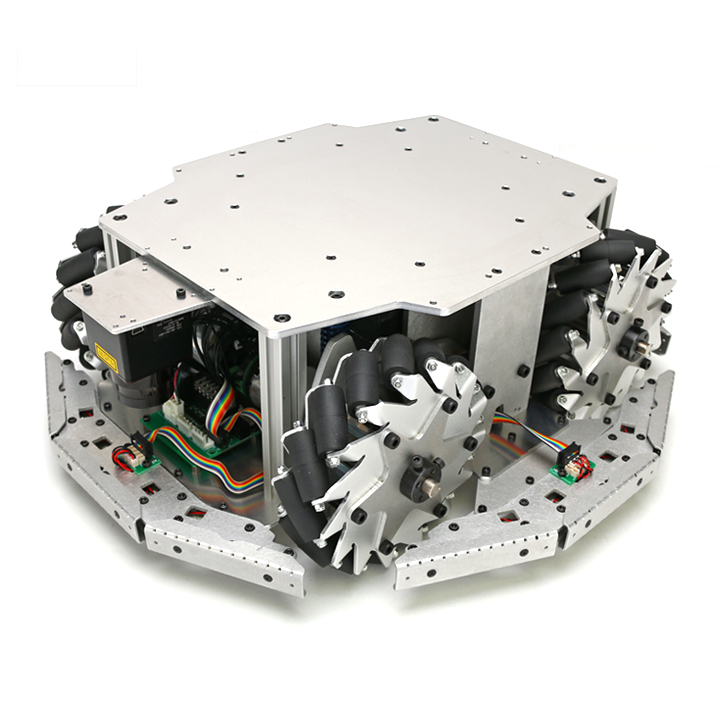
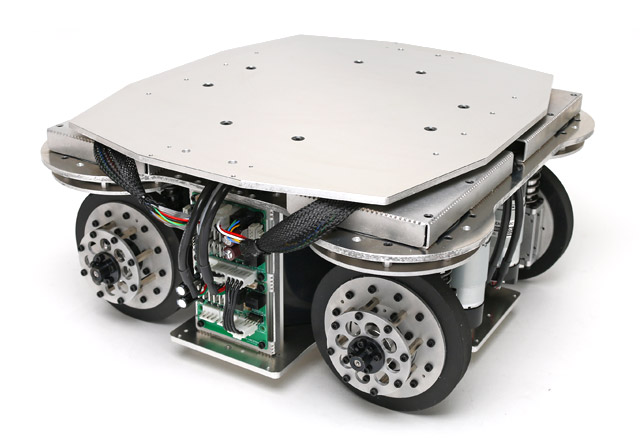
01���J�i���z�C�[�����ڂ̌����J���p��ԃ��{�b�g ���J�i�����[�o�[Ver2.1
���J�i�����[�o�[Ver2.1�́A���d�ʖ�40kg���������������J���p��ԃ��{�b�g�̃x�[�V�b�N���f���ł��B�A���~�t���[�����̗p�����y�ʁE�������Ȏԑ̂ƁAArduinoIDE�ł̃v���O�����쐬��ROS�ł̐���ɑΉ�����J���e�Ր�������A�����A�J���p�̃x�[�X���{�b�g�Ƃ��āA�܂��A������ԂƂ��Ă̊��p�ȂǁA�L�͈͂ȗp�r�ɑΉ��ł��܂��B
����A�������̃��J�i�����[�o�[Ver2.0�ɑ��āA���[�U����̃t�B�[�h�o�b�N�̔��f�A�M�����̂���Ȃ����Ȃǂ������AVer2.1�Ƃ��ăA�b�v�f�[�g���s���܂����BROS�Ή���L�x�ȃI�v�V�����̐ݒ�ȂǁA�������i�̃����b�g�͂��̂܂܂ɁA����ɂ����ꂽ�g���S�n�����肵�Ď������܂��B
 |
 |
 |
 |
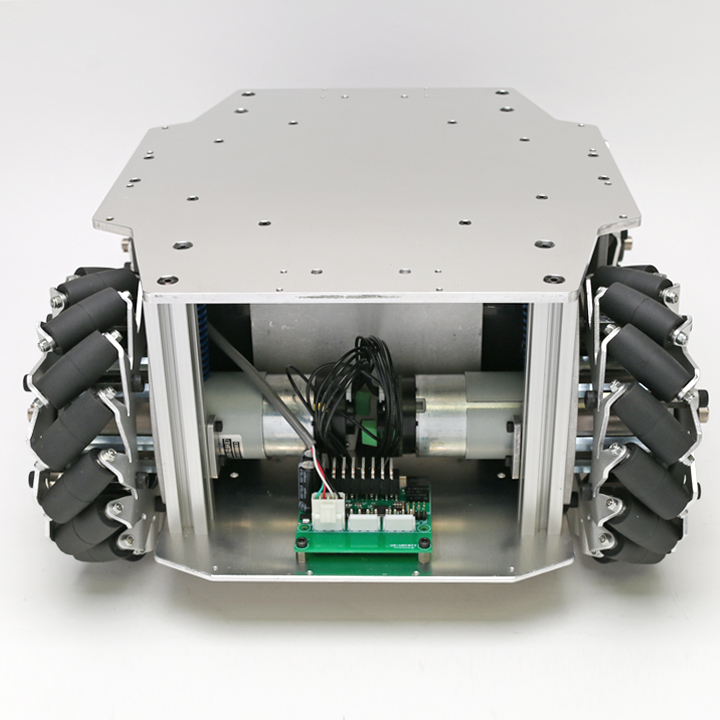
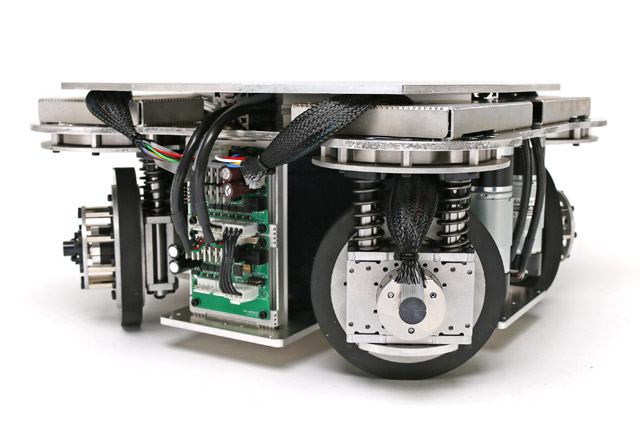
�l�ւ̃��J�i���z�C�[���𓋍ڂ�����^��ԃ��{�b�g
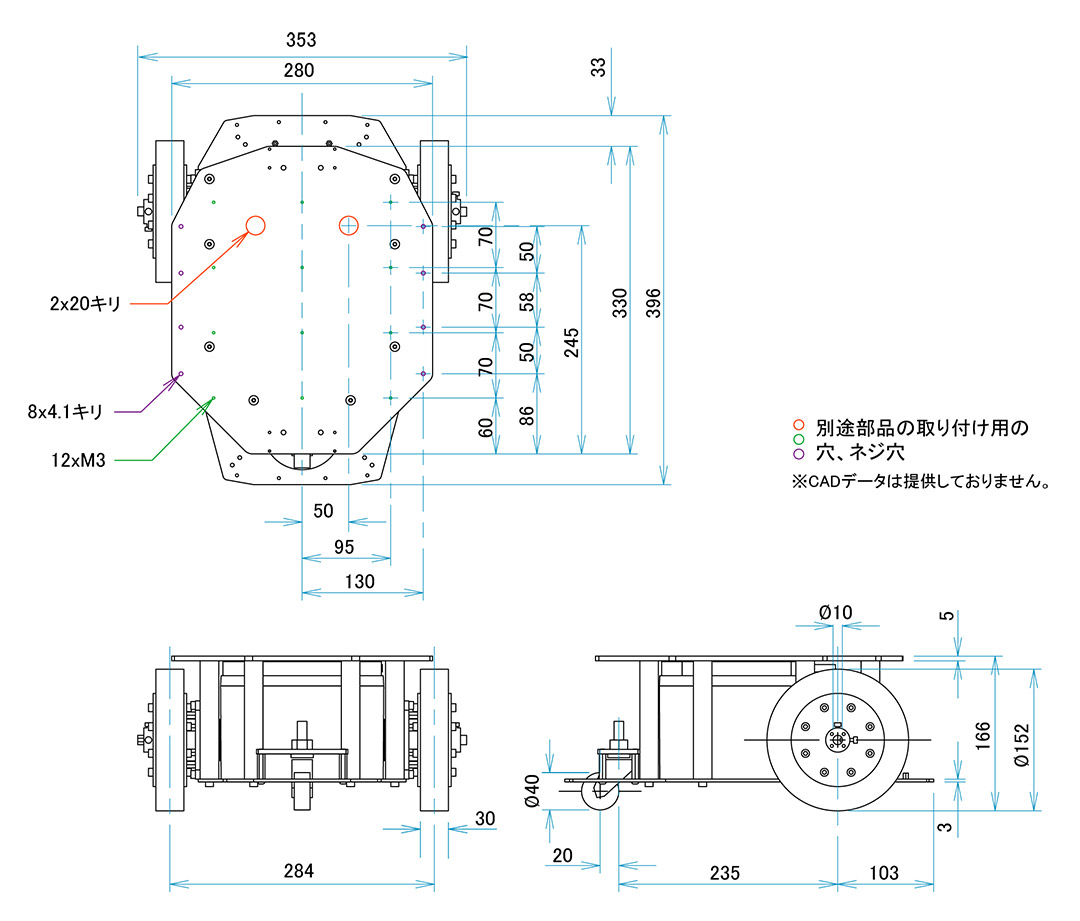
���J�i�����[�o�[Ver2.1�́A�l�ւ̃��J�i���z�C�[���𓋍ڂ����S���ʈړ���ԃ��{�b�g�ł��B
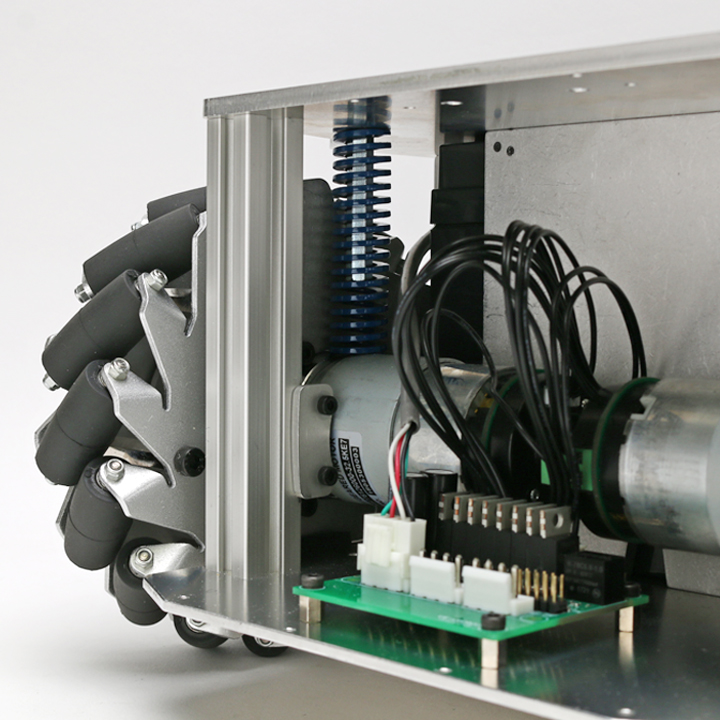
���J�i���z�C�[���̓��������A�O�i�A��ށA���E����╽�s�ړ��Ȃǂ��T�X�y���V�����\���Ȃ��Ŏ������Ă���ق��A�ԗ֕����ɂ̓T�X�y���V�����\��������A���肵������Ƒ��s���\�ł��B
�I���j�z�C�[���ɂ��S���ʈړ��Ɣ�r����ƁA���J�i���z�C�[����Ԃ͐Ïl����U���̏��Ȃ��Ȃǂɓ���������܂��B
���J�i�����[�o�[Ver2.1�́A���d�ʖ�40kg�A�ō����x1.3m/s�ŁA�l�X�ȗp�r�̌����E�J���ړI�ɗ]�T�������đΉ����\�ł��B
��Ƃ�̂�����d�ʂ��A���x�Ȑ���pPC�̓��ڂ���p�r��ړI�Ƃ����e��@��̓��ڂ���������ق��A��^�o�b�e���[�𓋍ڂ��邱�Ƃɂ��A��21���Ԃ̉ғ����Ԃ��������܂����B
���o�b�e���[�쓮���Ԃɂ��ẮA�W���I�Ȋ����ł̐v�l�ł��B���p�̏ɂ���āA�o�b�e���[�쓮���Ԃ͑傫���قȂ�܂��B
�L��/�����ڑ��ɂ�鐧��
���J�i�����[�o�[Ver2.1�́AWi-Fi / BLE / BluetoothClassic ��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B �w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�ŃR���g���[��
���J�i�����[�o�[Ver2.1�́AROS���b�Z�[�W�ʐM�ɑΉ����Ă��܂��B
ROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁAROS���g�������䂪�\�ƂȂ�܂��B
ROS���b�Z�[�W�ʐM���g�����ƂŁA���x�����ʂ̎w�ߒl���A�킸�����s�̃R�[�h�Ń��J�i�����[�o�[Ver2.1�ɑ��M���邱�Ƃ��ł��AROS���{�b�g�Ƃ��ĕ��L�����p���\�ł��B
�����h�L�������g�ƈȉ��̃T���v���v���O�������t�����邽�߁A���S�҂̕��ł��AROS���Ő���V�X�e�����쐬���A�ȒP�ɓ��������Ƃ��ł��܂��BLRF�Ȃǂ̃Z���T��p�������x�Ȑ�����A���Ȃ��J�����S�Ŏ������邱�Ƃ��\�ł��B
ROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͌�q�̒ʂ�ł�
�yROS�T���v���v���O�����ꗗ�z
- �Q�[���p�b�h����̑���
- �}�E�X�i�^�b�`�p�b�h�j����̑���
- SLAM�igmapping�j
- SLAM(cartographer)
- navigation
���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
��SLAM�Anavigation���s�����߂ɂ�LRF���K�v�ł��BLRF�I�v�V�����̂����p���֗��ł��B
�yROS�g�p���̐���������z
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 7200U | Core i5 8259U |
| ������ | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
| �X�g���[�W | SSD 128GB | M.2 SSD 256GB |
| �O���t�B�b�N | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
���L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
Arduino IDE�Ńv���O�����\
���J�i�����[�o�[Ver2.1�̐���{�[�h�ł���uVS-WRC051�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă��܂��B ���̂��߁AArduino IDE��p���ă��J�i�����[�o�[Ver2.1�̐���v���O�������쐬���邱�Ƃ��ł��܂��B ���i�t���̃��C�u�����ɂ́A���[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��\�ł��B
��VS-WRC051��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.9�ȏオ���삷������K�v�ł��B
��p�̖����R���g���[���[�ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���[�uVS-C3�v���g���APC����ڑ����Ȃ��Ă��A���J�i�����[�o�[Ver2.1�����c���邱�Ƃ��ł��܂��B �A�i���O�X�e�B�b�N���g�p���āA�O�㍶�E�ֈړ��A��]�����邱�Ƃ��ł��܂��̂ŁA�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
���J�i�����[�o�[Ver2.0����̕ύX�_
- �d�������H�̒lj�
���[�^�[�d�������H��lj����邱�ƂŁA���ׂ��Ȑ��䂪�ł���悤�ɂȂ�A�ߕ��ׂɂ������Ȃ�܂����B - �ʐM�o�H�̑m�C�Y���\����
�{�̓��̒ʐM�o�H�ɂ��āA�m�C�Y���\�����コ���܂����B�^�p�̈��萫���オ�����߂܂��B
�@�\���g������I�v�V����
���J�i�����[�o�[Ver2.1�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
�@�̎��͂̏�Q���������m����LRF�����t����A�{�̒������̗L���I�v�V�����ł��B - �O��o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O��Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �S���̓o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O�㍶�E�Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �g���@��p�d�����
Raspberry Pi 4B 2GB�ł�ROS PC�I�v�V�����Ȃǂ̊g���@��𓋍ڂ����ۂɁA���J�i�����[�o�[�{�̂̃o�b�e���[����d������������A�{�̒������̗L���I�v�V�����ł��B Raspberry Pi 4B 2GB�ŃI�v�V�������ڎ������ ROS PC�I�v�V�������ڎ��ɂ͕K�{�ƂȂ�܂��B - Raspberry Pi 4B 2GB��
Raspberry Pi 4B 2GB�ł����t���ďo�ׂ���A�{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��BSD�J�[�h�����OS�C���[�W�͕t�����܂���B - ����~�X�C�b�`�I�v�V����
��Ԗ{�̂̌�ɔ���~�X�C�b�`�����t���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B - ROS PC
ROS�Ő��䂷�邽�߂̊��\�z�ς�PC�����t����{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��B
�y���p����z
�V�����Ɛe���݂₷�����������A
��ו��A�����{�b�g RAXii�i���N�V�[�j
�f�U�C���E�v�Z�p���厲�Ƃ������i�ӏ��̃J�X�^���J���T�[�r�X�A�ȈՋ��^/�^���X�H�@�ɂ�鏬���b�g�������i�̒����ƂƂ��銔����ЃA�[�N�l���A��^���Ǝ{�݂Ŋ��郍�{�b�g�̃f�U�C���W�J����Ƃ��āA���̋쓮�����Ƀ��J�i�����[�o�[�����̗p���������܂����B

01-2�����J���p��ԃ��{�b�g�u���J�i�����[�o�[Ver2.1�v�̃����^���T�[�r�X���J�n

���А��̌����J���p��ԃ��{�b�g�V���[�Y�́A���������Ɋւ��錤���E�J���p�r��A�����^�]�A�����Ɋւ���Љ�C���t���̌����ȂǂɍL���̗p����Ă��܂��B�����̐���ɂ��v���̍��܂�ɉ����A�쓮�����̑��l����ROS�Ή��ɂ��J���̗e�Չ��A�ύڔ\�͂̌���ȂǁA�j�[�Y�ɍ��킹�����C���i�b�v�̊g�[��i�߂Ă���A�������{�b�g�⎩�����䃍�{�b�g�Ƃ��āA�Љ�̃I�[�g���[�V�������Ɍ����������̑����Ŋ��p����Ă��܂��B
�{�T�[�r�X�́A���А��̌����J���p��ԃ��{�b�g�V���[�Y�̂����̈�ł���u���J�i�����[�o�[Ver2.1�v���A�����^���Œ�����̂ł��B���{�b�g�{�̂������^���Ƃ��邱�ƂŁA�����@�ނ̔�p���Z���_����A�@�ޓ������X���[�Y�Ɏ����ł��܂��B
| ��� | �@�̎d�l | �����^������ �� | �Q�l�����^����p�i�ŕʁj �� | ���[�U�[�ł̋@�̉��� |
|---|---|---|---|---|
| �Z�������^�� | ���K���[�o�[Ver2.1 �ʏ�@�� |
10���� | 10,000�~/�� | �s�� |
| ���������^��A | ���J�i�����[�o�[Ver2.1 �ʏ�@�� |
6�����` | ����6�����F55,000�~/�� �_�����i12�����܂Łj�F30,000�~/�� �_�����i13�����ȏ�j�F20,000�~/�� |
�� |
| ���������^��B | ���J�i�����[�o�[Ver2.1 �o���p�[�Z���T�[�ALRF�����@�� |
6�����` | ����6�����F83,000�~/�� �_�����i12�����܂Łj�F45,000�~/�� �_�����i13�����ȏ�j�F25,000�~/�� |
�� |
�����������^���ɂ����郌���^�����Ԃɂ��ẮA���v�]�ɉ����Ē����\�ł��B
�܂��A�����^����p�̓����^�����Ԃɂ��ϓ����܂��B�ڂ����͂��₢���킹���������B
01-3ROS�Ή�3D�V�~�����[�^�[���f�� ���J�i�����[�o�[�� �z�z�J�n
ROS�Ή�3D�V�~�����[�^�[���f�� ���J�i�����[�o�[�ł́A���J�i�����[�o�[Ver2.1�ɑΉ�����3D���f�����A�I�[�v���\�[�X��3D�V�~�����[�^�[�ł���uGazebo�v��œ��삳���邱�Ƃ̂ł��郂�f���t�@�C���ł��B���J�i�����[�o�[Ver2.1�̎��@���Ȃ��Ă�Gazebo��ŃV�~�����[�V�������\�ŁA��^��ԃ��{�b�g�̃v���O�����쐬���Ɍ��ĂƂȂ肪���ȁA���S���̎��O�m�F��S�̓���̌��Ȃǂ������ł��܂��B
���Ђł́A���łɔz�z�J�n���Ă���uROS�Ή�3D�V�~�����[�^�[���f�� ���K���[�o�[�Łv�ƍ��킹�A�_��ŃI�[�v���ȃv���O���~���O���؊�����邱�Ƃɂ��A�����J���p��ԃ��{�b�g�V���[�Y�����p�����l�X�ȎЉ���̉��������͂Ɍ㉟�����ĎQ��܂��B
�yROS�Ή�3D�V�~�����[�^�[���f�� ���J�i�����[�o�[�Łz
3D�V�~�����[�^�[���ŁA���S����y�ɓ���m�F���\
����܂ŁA���J�i�����[�o�[�̎��@�ɂ����ē���m�F���s���ۂɂ́A���͂̈��S�m�F��o�b�e���[�̏[�d�Ǘ��A�ғ����̓���Ď��ȂǁA��^��ԃ��{�b�g�Ȃ�ł͂̎�舵����̒��ӓ_����������܂����B
�{���f����p����ƁA3D�V�~�����[�^�[��Gazebo��ő�ԃ��{�b�g�����z�I�ɓ��삳���邱�Ƃ��\�ƂȂ�܂��B���̂��߁A��{�I�ȃv���O��������m�F���V�~�����[�^�[��ōs���A�v���O�������e�̃u���b�V���A�b�v���ς܂����̂��ɁA���@�œ���m�F���s���Ƃ����J���H���ނ��Ƃ��ł��܂��B
�V�~�����[�^�[��ł̓�����e�͎��@�Ɗ��S�Ɉ�v������̂ł͂Ȃ����߁A���@�ł̓���m�F�͕K�v�ƂȂ�܂����A�J���H���S�̂Ŏ��@���������炷���Ƃ��ł��A����v���O�����쐬�̏ȗ͉��Ɋ�^���܂��B

�v���O�����쐬���̖��蕪���c�[���Ƃ��Ċ��p�\
��ԃ��{�b�g�̃v���O�����쐬�ɂ����āu���{�b�g�����܂������Ȃ��v���̖�肪�������A���̉��������݂鎞�ɂ́A���̌������v���O�������ɂ��邩�A�n�[�h�E�F�A���ɂ��邩�A���邢�̓l�b�g���[�N�⑼�f�o�C�X�Ƃ̐ڑ����ł��邩�ɂ���đΉ����قȂ�܂��B���́u��蔭���ӏ��̓���Ɖ����v�ɂ́A���̉\��������ɂ킽�邱�Ƃ�����A�����̎��Ԃ�v���܂��B
�{���f����p����ƁA3D�V�~�����[�^�[��Ńv���O���������s���邱�Ƃɂ��A���z�I�ȏ�Ԃł̃v���O�������s���ʂ��m�F���邱�Ƃ��ł��܂��B�����������s���ނ��ƂŁA��肪�ǂ��Ŕ������Ă��邩��c�����邱�Ƃ��A���v���ɂȂ邱�Ƃ����҂ł��܂��B
�V�~�����[�^�[�̃��f���͓Ǝ��Ɋg�����\
�{���f���̓��J�i�����[�o�[�̕W���@�̂��V�~�����[�V�������Ă��܂����A���[�U�[�̎茳�Ń��f���̒lj���ҏW���\�ł��B���g�p�̊��ɍ��킹�����f���ύX�����s�����ƂŁA�ړI�ƂȂ铮����ɂ��߂Â����V�~�����[�V���������s�ł��A���ʂ̗L�p���������������܂�܂��B
�e��̐�p�I�v�V�����ɑΉ�
���J�i�����[�o�[Ver2.1���w������ۂɎw��ł���L���I�v�V�����ɂ��āA�{���f����ɂ���������Ă��܂��i�p�r�ɍ��킹�A�ݒ�t�@�C����ύX���邱�Ƃɂ�胂�f���̗L���E�������I���ł��܂��j�B
�����ς݃I�v�V�����͈ȉ��̒ʂ�ł����A���̋@�\�܂ł��V�~�����[�V����������̂́uLRF�I�v�V�����v�u�S���̓o���p�[�I�v�V�����v�݂̂ł��B���͌`��Ǝ��ʂ݂̂̃��f���ƂȂ��Ă��܂��B
- LRF�I�v�V����
- �S���̓o���p�[�I�v�V����
- ����~�X�C�b�`�I�v�V����
- ���C�����X�[�d�I�v�V����
- ROS PC�I�v�V����
���{�b�g�{�̂��茳�ɂȂ��Ă��V�~�����[�V���������s�\
�{���f���̓V�~�����[�^�[���Ŋ������ė��p�ł��A���J�i�����[�o�[�{�͕̂K�v����܂���B���̂��ߕ����l�Ń��{�b�g�{�̂��V�F�A���ĊJ����i�߂�ꍇ�Ȃǂɂ����Ă��A�������̗ǂ��v���W�F�N�g�̐i�s�Ɋ�^���܂��B
���J�i�����[�o�[��ROS���{�b�g����p�̋��ނƂ��Ċ��p����Ƃ������V�[����A���J�i�����[�o�[�w���O�̓���m�F�Ƃ������p�r�ɂ����v���܂��B
�������ӂ���������
�{���f���́A3D�V�~�����[�^�[�uGazebo�v��Ń��J�i�����[�o�[�̊�{�I�ȓ���m�F���s�����Ƃ�ړI�Ƃ��Ă��܂��BGazebo�̔\�͂���V�~�����[�V�����ɂ͑Ή��ł��Ȃ��ق��A�����Ɏ��@�Ɠ����������V�~�����[�V�������邱�Ƃ�ړI�Ƃ������̂ł͂���܂���B�ŏI�I�ȓ���m�F�͎��@�̃��J�i�����[�o�[���g�����Ƃ������������܂��B���ɁA���C�W���ɂ��Ă͌����Ɏ�������Ă��܂���̂ŁA�d�ʕ��𓋍ڂ����ꍇ�̃V�~�����[�V�������ʂɂ��ẮA�����Ƃ̍��ق��傫���Ȃ�\��������܂��B
�܂��AROS�Ή�3D�V�~�����[�^�[���f�� ���J�i�����[�o�[�łƂ��Ĕz�z�������̂́A�����܂ŃV�~�����[�^�[�p�̃��f���t�@�C���Ƃ���ɕt��������݂̂ƂȂ��Ă��܂��B���J�i�����[�o�[�̎��@�Ɋւ�����́A�{���f���ɕt�����Ă͒���܂���B
01-4�M�A��ύX�I�v�V�����i�l�֔Łj����
���ڂ��郂�[�^�[�̃M�A���ύX�ł���A���J�i�����[�o�[Ver2.1�{�̂��������̗L���I�v�V�����ł��B�ʏ�� 32.5�F1 �ł���M�A�䂪 71.2�F1 �ɕύX����A�ᑬ���̋������萫��ʒu����̐��x���オ�����߂܂��B
�Ȃ��{�I�v�V�����́A���t����M�A�h���[�^�[�̎�ނ�ύX���邱�Ƃɂ��������Ă��܂��B�ʏ�̃��[�^�[�Ɩ{�I�v�V�����p�̃��[�^�[�̍��݂�ʓY�ł̔[�i�A�[�i��ɂ��q�l�ɂăM�A���ύX���邱�Ƃɂ͑Ή����Ă��܂���B�܂��A�M�A�h���[�^�[�̏o�̓g���N�ɂ��ẮA��������ɂ��傫���قȂ邽�߁A���i�d�l�Ƃ��Ă͖������Ă���܂���B
014�֓Ɨ��X�e�A�����O�쓮���S���ʈړ���ԃ��{�b�g�u4WDS���[�o�[Ver2.1�v
4WDS���[�o�[Ver2.1�́A�l�ւ̓Ɨ��쓮�ւ�����A���ꂼ��̎ԗւ��X�e�A�����O�ŕ����]�������邱�Ƃɂ��A�S���ʂւ̃X���[�Y�ȓ������������ړ���ԃ��{�b�g�ł��B�����A�J���p�̃x�[�X���{�b�g�Ƃ��āA�܂��A������ԂƂ��Ă̊��p�ȂǁA�L�͈͂ȗp�r�ɑΉ��ł��܂��B����A��������4WDS���[�o�[Ver2.0�ɑ��āA���[�U����̃t�B�[�h�o�b�N�̔��f�A�M�����̂���Ȃ����Ȃǂ������AVer2.1�Ƃ��ăA�b�v�f�[�g���s���܂����BROS�Ή���L�x�ȃI�v�V�����̐ݒ�ȂǁA�������i�̃����b�g�͂��̂܂܂ɁA����ɂ����ꂽ�g���S�n�����肵�Ď������܂��B
�����ύځA0.3m/s�ł̒葬���s�ɂ��Q�l�l�ł��B
 |
 |
 |
 |
�Ɨ��쓮�ւɂ�鐳�m�ȑS���ʈړ��ƁA�������\��
�l�ւ̓Ɨ��쓮�ւɂ��A�O�i�E��ށE�����łȂ��A���E������ߕ����ւ̕��s�ړ����\�ł��B�I���j�z�C�[����J�i���z�C�[���ȂǁA���̑S���ʈړ��@�\�Ɣ�r���A���ׂ�Ȃǂ̈ʒu���ꂪ�����ɂ����_�������ŁA�e�ԗւɃT�X�y���V�����@�\������A���4�̋쓮�ւ��n�ʂɐڒn���邽�߁A�������i���������ł��܂��B�܂��A�ʏ�̎ԗւ�p���Ă��邽�߁A���̑S���ʈړ��@�\�����ړ������Ïl�ł���_���傫�ȃ����b�g�ł��B
4WDS���[�o�[Ver2.1�́A���d�ʖ�40kg�A�ō����x1.5m/s�ŁA�l�X�ȗp�r�̌����E�J���ړI�ɗ]�T�������đΉ����\�ł��B��Ƃ�̂�����d�ʂ��A���x�Ȑ���pPC�̓��ڂ���p�r��ړI�Ƃ����e��@��̓��ڂ��������܂��B�o�b�e���[�ɂ��ғ����Ԃ͖�25���ԁi���j�ŁA���ʂȎ����p�r�ł̒����ԋ쓮���\�Ƃ��܂��B
���o�b�e���[�쓮���Ԃɂ��ẮA�W���I�Ȋ����ł̐v�l�ł��B���p�̏ɂ���āA�o�b�e���[�쓮���Ԃ͑傫���قȂ�܂��B
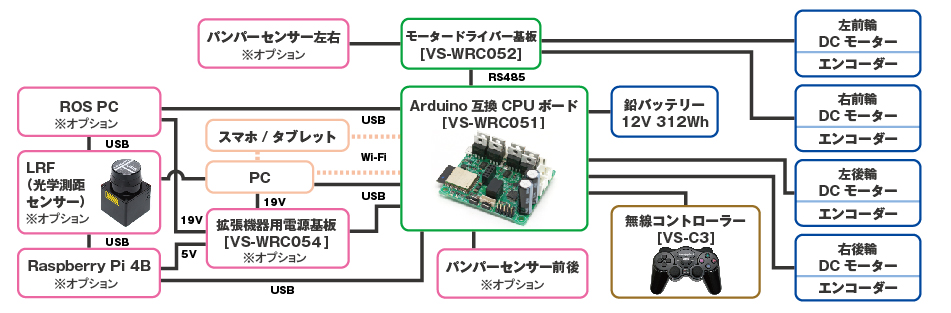
�L��/�����ڑ��ɂ�鐧��
4WDS���[�o�[Ver2.1�́AWi-Fi / BLE / BluetoothClassic ��3��̖����ʐM�ƁA�L����USB�V���A���ʐM�ɑΉ����Ă��܂��B �w��̃R�}���h��p���邱�ƂŁAPC��^�u���b�g�ȂǁA�l�X�ȃf�o�C�X���琧�䂷�邱�Ƃ��\�ł��B
ROS���b�Z�[�W�ʐM�ŃR���g���[��
4WDS���[�o�[Ver2.1�́AROS���b�Z�[�W�ʐM�ɑΉ����Ă��܂��BROS�����삷��f�o�C�X��Wi-Fi�܂���USB�P�[�u���Őڑ����邱�ƂŁAROS���g�������䂪�\�ƂȂ�܂��B ROS���b�Z�[�W�ʐM���g�����ƂŁA���x�����ʂ̎w�ߒl���A�킸�����s�̃R�[�h��4WDS���[�o�[Ver2.1�ɑ��M���邱�Ƃ��ł��AROS���{�b�g�Ƃ��ĕ��L�����p���\�ł��B �����h�L�������g�ƈȉ��̃T���v���v���O�������t�����邽�߁A���S�҂̕��ł��AROS���Ő���V�X�e�����쐬���A�ȒP�ɓ��������Ƃ��ł��܂��BLRF�Ȃǂ̃Z���T��p�������x�Ȑ�����A���Ȃ��J�����S�Ŏ������邱�Ƃ��\�ł��B ROS�삳����f�o�C�X�͕ʓr���p�ӂ��������K�v������܂��B���ЂŐ�������f�o�C�X�̓�����͌�q�̒ʂ�ł��B
�yROS�T���v���v���O�����ꗗ�z
- �Q�[���p�b�h����̑���
- �}�E�X�i�^�b�`�p�b�h�j����̑���
- SLAM�igmapping�j
- SLAM(cartographer)
- navigation
���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B
��SLAM�Anavigation���s�����߂ɂ�LRF���K�v�ł��BLRF�I�v�V�����̂����p���֗��ł��B
�yROS�g�p���̐���������z
| OS | Ubuntu 16.04 (64bit) | Ubuntu18.04 (64bit) |
| ROS | ROS Kinetic | ROS Melodic |
| CPU | Core i5 7200U | Core i5 8259U |
| ������ | DDR4 PC4-17000 4GB | DDR4 PC4-19200 8GB |
| �X�g���[�W | SSD 128GB | M.2 SSD 256GB |
| �O���t�B�b�N | Intel HD Graphics 620 | Intel Iris Plus Graphics 655 |
���L���������Ă��Ă��A�����Ȃǂɂ��A����ɓ��삵�Ȃ��ꍇ������܂��B
���z���́A�^�C�����O�ɂ����S�Ȑ��䂪�s���Ȃ��ꍇ������A�������Ă���܂���B
Arduino IDE�Ńv���O�����\
4WDS���[�o�[Ver2.1�̐���{�[�h�ł���uVS-WRC051�v�ɂ́AESP32-WROOM-32�}�C�R�������ڂ���Ă��܂��B ���̂��߁AArduino IDE��p����4WDS���[�o�[Ver2.1�̐���v���O�������쐬���邱�Ƃ��ł��܂��B ���i�t���̃��C�u�����ɂ́A���[�^�������ʐM�����܂܂�Ă��܂��̂ŁA���Ȃ��J�����S�Ő���v���O�������쐬���邱�Ƃ��\�ł��B
��VS-WRC051��Arduino IDE��p���ăv���O���~���O����ꍇ�AArduino IDE 1.8.9�ȏオ���삷������K�v�ł��B
��p�̖����R���g���[���[�ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���[�uVS-C3�v���g���APC����ڑ����Ȃ��Ă��A4WDS���[�o�[Ver2.1�����c���邱�Ƃ��ł��܂��B �A�i���O�X�e�B�b�N���g�p���āA�O�㍶�E�S�����ֈړ��A��]�����邱�Ƃ��ł��܂��̂ŁA�蓮���c�œ��삳����ۂ�A����m�F���ɂ��g�����������܂��B
4WDS���[�o�[Ver2.0����̕ύX�_
- �d�������H�̒lj�
���[�^�[�d�������H��lj����邱�ƂŁA���ׂ��Ȑ��䂪�ł���悤�ɂȂ�A�ߕ��ׂɂ������Ȃ�܂����B - �ʐM�o�H�̑m�C�Y���\����
�{�̓��̒ʐM�o�H�ɂ��āA�m�C�Y���\�����コ���܂����B�^�p�̈��萫���オ�����߂܂��B
�@�\���g������I�v�V����
4WDS���[�o�[Ver2.1�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
�@�̎��͂̏�Q���������m����LRF�����t����A�{�̒������̗L���I�v�V�����ł��B - �O��o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O��Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �S���̓o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O�㍶�E�Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �g���@��p�d�����
Raspberry Pi 4B 2GB�ł�ROS PC�I�v�V�����Ȃǂ̊g���@��𓋍ڂ����ۂɁA4WDS���[�o�[�{�̂̃o�b�e���[����d������������A�{�̒������̗L���I�v�V�����ł��B Raspberry Pi 4B 2GB�ŃI�v�V�������ڎ������ ROS PC�I�v�V�������ڎ��ɂ͕K�{�ƂȂ�܂��B - Raspberry Pi 4B 2GB��
Raspberry Pi 4B 2GB�ł����t���ďo�ׂ���A�{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��BSD�J�[�h�����OS�C���[�W�͕t�����܂���B - ����~�X�C�b�`�I�v�V����
��Ԗ{�̂̌�ɔ���~�X�C�b�`�����t���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B - ROS PC
ROS�Ő��䂷�邽�߂̊��\�z�ς�PC�����t����{�̒������̗L���I�v�V�����ł��B�g���@��p�d����I�v�V����VS-WRC054���ʓr�K�v�ł��B
01���K���[�o�[Ver2.1 Jetson AGX Xavier™���ڔ�
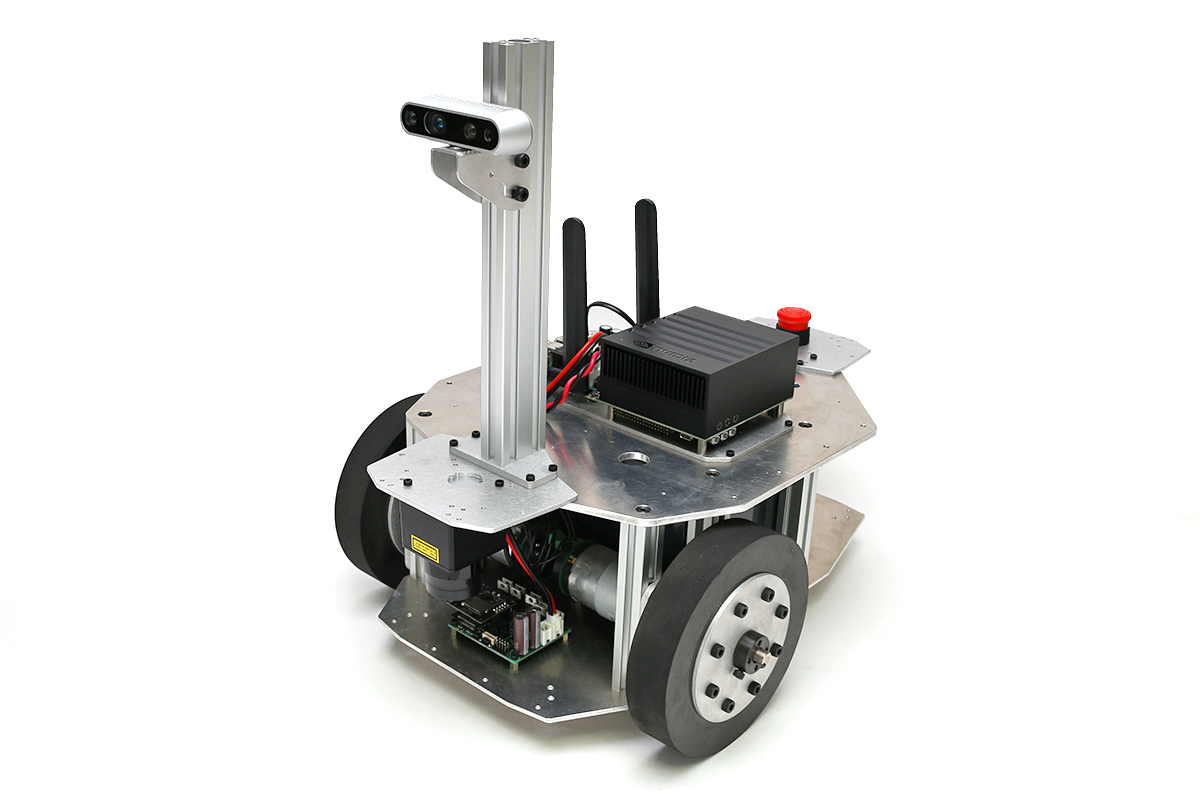
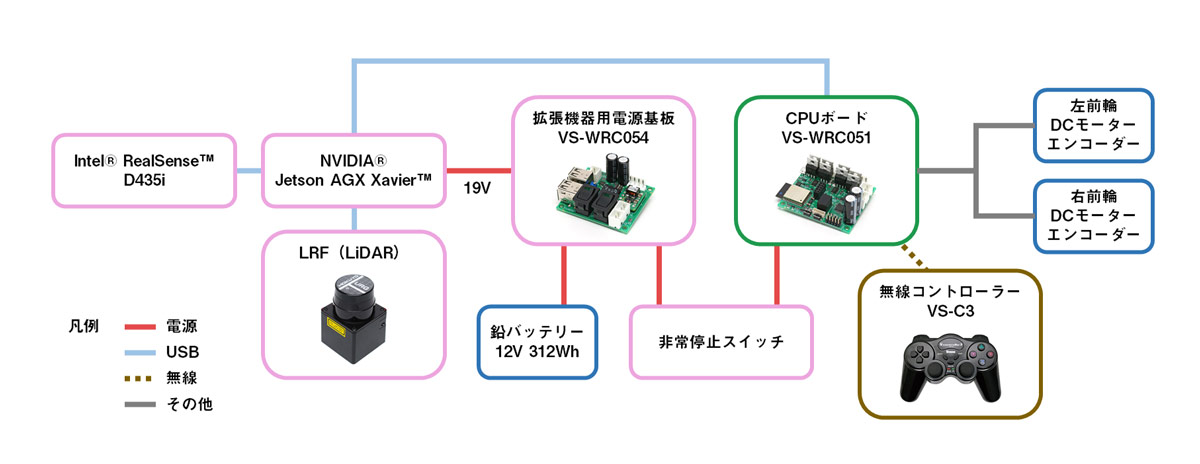
�u���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔŁv�́A���А��̌����J���p��ԃ��{�b�g�ł��郁�K���[�o�[Ver2.1�ɁANVIDIA Jetson AGX Xavier�J���҃L�b�g�ƃf�v�X�J�����I�v�V�����ALRF�I�v�V�����i�O�j�A����~�X�C�b�`�I�v�V�����𓋍ڂ������@�\���f���ł��BJetson AGX Xavier�ɂ�512 �R�A��NVIDIA Volta? GPU�����ڂ���Ă���A�e��̃J������Z���T�[�f�o�C�X������͂��ꂽ�������x�ɏ������邱�Ƃ��\�ł��BNVIDIA�Ђɂėp�ӂ��ꂽ�\�t�g�E�F�A���C�u���������̂܂g�p�ł��邽�߁A������AI�����ȂǂɊ�Â����x�Ō���I�Ȏ�������v���O�������A�����J���p��ԃ��{�b�g�̖{�̓��Ŏ��s�ł��܂��B
NVIDIA Jetson AGX Xavier�J���҃L�b�g�𓋍�
���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔŁA�����Jetson AGX Xavier�I�v�V�����ɍ̗p����Ă���NVIDIA Jetson AGX Xavier�J���҃L�b�g�́A512�R�A NVIDIA Volta GPU�A8�R�A ARMR v8.2 64�r�b�gCPU�A32GB��LPDDR4�������[�A32GB��eMMC�X�g���[�W�𓋍ڂ��A�ő��32TOPS�̉��Z�\�͂����܂��BJetson AGX Xavier�ɂ���Ď�������鍂�����x���̃G�b�W�R���s���[�e�B���O�p�t�H�[�}���X�́A�uROS PC�I�v�V�����v�Ȃǒʏ��PC�ł͕��ׂ��傫�����鏈���ɑ���V���ȉ�����ƂȂ�܂��B�܂���p��Wi-Fi�A���e�i�����ڂ��Ă���A�O���@��ƍ��x�ɘA�g����V�X�e�����\�z���邱�Ƃ��\�ł��B

NVIDIA�Ђ̃\�t�g�E�F�A���C�u���������p�\
���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔł́A�d�����̔z���Ǝ��t���݂̂��s������Ԃɂďo�ׂ���܂��BUbuntu���\�z���܂߂ĕ��Ђł̓Z�b�g�A�b�v�����s��Ȃ��A������Jetson AGX Xavier�J���҃L�b�g�Ƃ��Ē��܂��̂ŁA���q�l�ɂ����Ď��R�x�̍��������E�J�����\�ł��BNVIDIA�Ђɂ���ėp�ӂ��ꂽJetson AGX Xavier�p�̃\�t�g�E�F�A���C�u���������̂܂܊��p�\�ł��B�Ȃ����Ђł́AJetson AGX Xavier��Ubuntu18.04�����\�z�������ROS Melodic���Z�b�g�A�b�v���A���А������J���p��ԃ��{�b�g�p�ɒ��Ă���ROS�T���v���v���O������p���ē�����m�F���Ă��܂��B
�����J���ɓK�����Z���T�[�ނ𓋍�
���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔłɂ́A���K���[�o�[Ver2.1����{➑̂Ƃ��Ĉȉ��̃I�v�V�����p�[�c�𓋍ڂ��Ă��܂��B�L�x�ȃZ���T�[�A���Ӌ@�����蓋�ڂ��Ă���A�l�X�Ȍ����E�J���p�r�ɂ����Ċ��p���邱�Ƃ��ł��܂��B
�y���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔ� �@�ލ\���z
- ���K���[�o�[Ver2.1
- Jetson AGX Xavier�I�v�V����
- �g���@��p�d�����VS-WRC054
- LRF�I�v�V�����i�O�j
- �f�v�X�J�����I�v�V�����i�J�����X�e�[�I�v�V�������܂ށj
- ����~�X�C�b�`�I�v�V����
���̌����J���p��ԃ��{�b�g�V���[�Y�ɂ����ډ\
Jetson AGX Xavier�I�v�V�����́A���А������J���p��ԃ��{�b�g�̉��L���f���ɓ��ڂ��\�ł��B���K ���[�o�[Ver2.1 Jetson AGX Xavier���ڔłقǂ̍��@�\���s�v�ł���A���J�i���z�C�[���쓮���K�v�ł��� �ȂǁA�����E�J�����s������̃j�[�Y�ɍ��킹���@�̂ɓ��ڂ��邱�ƂŁA����GPU�����\�͂�l�X�ȗp�r�� ���ʓI�Ɋ��p���邱�Ƃ��\�ƂȂ�܂��B
�yJetson AGX Xavier�I�v�V�����Ή��@��z
���K���[�o�[Ver2.1�A ���K���[�o�[Ver2.1 �t���J�X�^���ŁA ���J�i�����[�o�[Ver2.1�A4WDS���[�o�[Ver2.1�A ���K���[�o�[F120�A ���J�i�����[�o�[G120
�i���j �{�I�v�V�����ɂ́A�쓮�̂��ߊg���@��p�d�����VS-WRC054�̓��ڂ��K�{�ƂȂ�܂��B
02���i�d�l
| ���i�� (�^��) |
���K���[�o�[Ver2.1 | ���J�i�����[�o�[Ver2.1 | 4WDS���[�o�[Ver2.1 |
|---|---|---|---|
| ���i�i�Ŕ��j | 350,000�~ | 500,000�~ | �₢���킹 |
| �S�� | 396mm | 398mm | 383mm |
| �S�� | 353mm | 349mm | 376mm |
| �S�� | 166mm | 166mm | 193mm |
| �{�̏d�� | ��15kg | ��20kg | - |
| �ύڏd�� | ��40kg | ||
| �{�̍ގ� | �A���~�j�E�� | ||
| �ō����x�i�����l�j | 1.4m/s | 1.3m/s | 1.5m/s |
| �o�b�e���[ | 12V�V�[�����@312Wh | ||
| �ғ����ԁi�ڈ��j | ��30���� | ��21���� | ��25���� |
| �쓮���� | 2�쓮 �㕔�L���X�^�[ �~1 | 4�쓮���J�i���z�C�[�� �T�X�y���V�������� | 4�쓮 4�֓Ɨ��X�e�A�����O �T�X�y���V���� |
| �^�C�����a | 152mm | 122mm | |
| ���[�^�[ | DC���[�^�[�@40W�~2 | DC���[�^�[�@40W�~4 | DC�u���V���X���[�^�[ �~4 DC���[�^�[ �~4 |
| ��]���o | �G���R�[�_�[ | �z�[���f�q �G���R�[�_�[(�� �v �G���R�[�_�[�I�v�V����) |
|
| ������ | VS-WRC051 | ||
| SDK | VS-WRC051�pArduino���C�u���� ROS�p�b�P�[�W |
||
| ���^�T���v�� |
[Arduino���C�u����] �E�ԗ��� �E�G���R�[�_�ǂݎ�� �E�e��ʐM�@�\�� [ROS�p�T���v���R�[�h] �E�Q�[���p�b�h����̑��� �E�}�E�X�i�^�b�`�p�b�h�j����̑��� �ESLAM�igmapping�j �ESLAM(cartographer) �Enavigation ���{���i�Ɋ܂܂�Ȃ����C�u�����Ȃǂ̃Z�b�g�A�b�v���lj��ŕK�v�ɂȂ�ꍇ������܂��B |
||
| �C���^�[�t�F�[�X | USB�V���A���AWi-Fi�ABluetooth Classic�ABLE | ||
| �t���i | �[�d��A�������c�Z�b�g | ||
| �������I�v�V���� | ���[�U�[�����W�t�@�C���_�[ �O��o���p�[ �g���@��p�d����� Raspberry Pi 4B 2GB�� ����~�X�C�b�` ���C�����X�[�d ROS PC �J�����X�e�[�I�v�V���� �f�v�X�J�����I�v�V���� �����[�g����I�v�V���� Jetson AGX Xavier�I�v�V���� �M�A��ύX�I�v�V���� |
���[�U�[�����W�t�@�C���_�[ �O��o���p�[ �S���̓o���p�[ �g���@��p�d����� Raspberry Pi 4B 2GB�� ����~�X�C�b�` ���C�����X�[�d ROS PC �J�����X�e�[�I�v�V���� �f�v�X�J�����I�v�V���� �����[�g����I�v�V���� Jetson AGX Xavier�I�v�V���� �M�A��ύX�I�v�V���� |
���[�U�[�����W�t�@�C���_�[ �O��o���p�[ �S���̓o���p�[ �g���@��p�d����� Raspberry Pi 4B 2GB�� ����~�X�C�b�` ���C�����X�[�d ROS PC �z�C�[���p�G���R�[�_ |
| ���w���͂����� | ���K���[�o�[Ver2.1 | ���J�i�����[�o�[Ver2.1 | 4WDS���[�o�[Ver2.1 |
| ���i�� (�^��) |
���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔ� |
|---|---|
| ���i�i10%����ō��j | 773,300�~ |
| �S�� | 353�~455�~434[mm] |
| �{�̏d�� | ��17,1kg |
| �ύڏd�� | ��40kg |
| �{�̍ގ� | �A���~�j�E�� |
| �ō����x�i�����l�j | 1.4m/s |
| �o�b�e���[ | 12V�V�[�����@312Wh |
| �쓮���� | 2�쓮 �㕔�L���X�^�[ �~1 |
| �^�C�����a | 152mm |
| ���[�^�[ | DC���[�^�[�@40W�~2 |
| ��]���o | �G���R�[�_�[ |
| ������ | VS-WRC051 |
| �t���i | �[�d��A�������c�Z�b�g |
| ���ڍς݃I�v�V���� | Jetson AGX Xavier�I�v�V���� �g���@��p�d�����VS-WRC054 LRF�I�v�V�����i�O�j �f�v�X�J�����I�v�V�����i�J�����X�e�[�I�v�V�������܂ށj ����~�X�C�b�`�I�v�V���� |
| ���w���͂����� | ���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔ� |
���{���i�͉�����p�ł��B���O�ł̎g�p�͑z�肵�Ă���܂���B
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��B
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��B

�g���p���ނ̓��ڗ�
(�lj��H����)
�J�X�^�}�C�Y�̂��ē�
�����J���p��ԃ��{�b�g�́A�W���@�ł͎d�l�����Ȃ��A�ʓr�@��𓋍ڂ��Č������������Ƃ�������Ɨl�����ɁA���v�]�ɍ��킹���n�[�h�E�F�A�̃J�X�^�}�C�X���\�ł��B�J�X�^�}�C�Y�ɂ������p�A�[���ɂ��Ă͗v�����ƂɈقȂ�܂��̂ŁA�܂��͂��C�y�ɂ����k���������B
���₢���킹�͂�����
���Ȃ��A���q�l�Ǝ��̃V�X�e���Ɋւ���J���E�T�|�[�g�͍s���Ă���܂���B
�J�X�^�}�C�Y����
A�ЁF�ғ����Ԃ����邽�߂Ƀo�b�e���[��
B�ЁF�ύڏd��300�s�p�Ƀn�[�h�E�F�A�̐v
C�ЁF�ʓr�@��𓋍ڂ��邽�߂̎��t������V�ɒlj��H
D�ЁF�ʓr�@��𓋍ڂ���̂��߂̂₮��̐v�A���t��
E�ЁF�I�v�V�����i��LRF�ł͂Ȃ����[�U�[���w�肷��LRF�����t��
F�ЁF��苭�͂ȃ��[�^�[�ւ̕ύX
�V�Ɋւ��āA�W���̌��ȊO�ɂ�������K�v�ȏꏊ�������X�y�[�X�ł���A�lj��Ńl�W���Ȃǂ̉��H��
�\�ł��B
���̑��̉��H�`��ɂ��܂��ẮA�ʓr�����k���������B
03�n�[�h�E�F�A�\��
���K���[�o�[Ver2.1
���J�i�����[�o�[Ver2.1
4WDS���[�o�[Ver2.1

���K���[�o�[Ver2.1 Jetson AGX Xavier���ڔ�
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
04�L���T�|�[�g�̂��ē�
�����J���p��ԃ��{�b�g�ɂ��āA���[���ł̃T�|�[�g�Ή��ł͂Ȃ��A Web�~�[�e�B���O�ł̂��ł����킹�ɂ��T�|�[�g��������܂��B ���i��30��������̒P���ƂȂ��Ă���܂��̂ŁA1���Ԃ�����]�̏ꍇ�ɂ�2���̂����������肢�������܂��B
���i�F30�� 1���~�i�ŕʁj
�y�ڍׁE���\�����݂͂�����z
Ubuntu�́ACanonical Ltd.�̏��W�܂��͓o�^���W�ł��B
Arduino�́AArduino AG�̓o�^���W�ł��B
Wi-Fi�́AWi-Fi Alliance�̓o�^���W�ł��B
BluetoothR�́ABluetooth SIG, Inc. USA�̏��W�܂��͓o�^���W�ł��B
Intel�A�C���e���́A�A�����J���O������� / �܂��͂��̑��̍��ɂ����� Intel Corporation �܂��͂��̎q��Ђ̏��W�ł��B
Raspberry Pi��Raspberry Pi���c�̏��W�܂��͓o�^���W�ł��B
Google�AFirebase��Google LLC�̓o�^���W�ł��B
Zoom��Zoom Video Communications, Inc.�̃T�[�r�X�ł���AZoom���S��Zoom Video Communications, Inc.�̓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
