オムニ?メカナム?独立ステア?全方位移動の沼 公開日:2026年1月7日 スタッフ日記 こんにちは♪ Ptai です。 ロボット競技で全方位移動を実現しようとすると、オムニホイール、メカナムホイール、独立ステアリングなど、いくつかの方式が思い浮かびますよね。それぞれにメリット・デメリットがあって、用途や競技 […] 続きを読む
ロボットも人間も適度な休憩が必要? 公開日:2025年12月17日 スタッフ日記 こんにちは♪ Ptai です。 最近、バッテリーを家に忘れてロボット大会の会場で困るという、なかなか痛い経験を積みました……。 「さぁロボットを動かすぞ!」というタイミングで、バッテリー残量がほとんど残っていないことに気 […] 続きを読む
用途に合わせてカスタムロボット 公開日:2025年12月10日 スタッフ日記 こんにちは♪ Ptai です。 今回は、弊社の新しいサービスについて少しご紹介します。Vstoneでは、ロボットの試作・カスタマイズに対応するサービス「プロトロボ」 をスタートしました。 先週、東京ビッグサイトで開催され […] 続きを読む
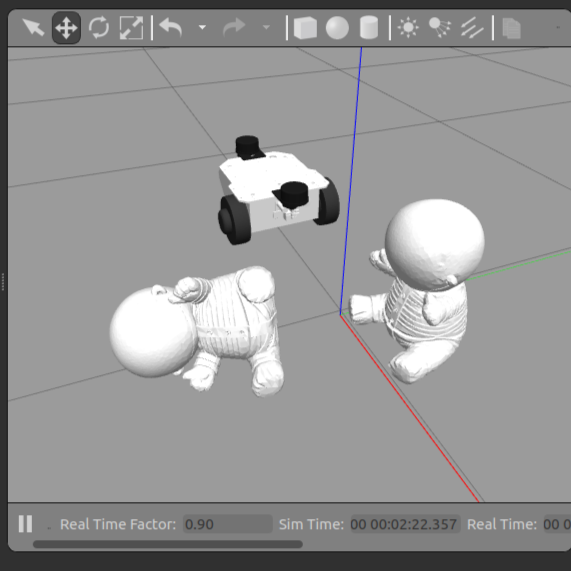
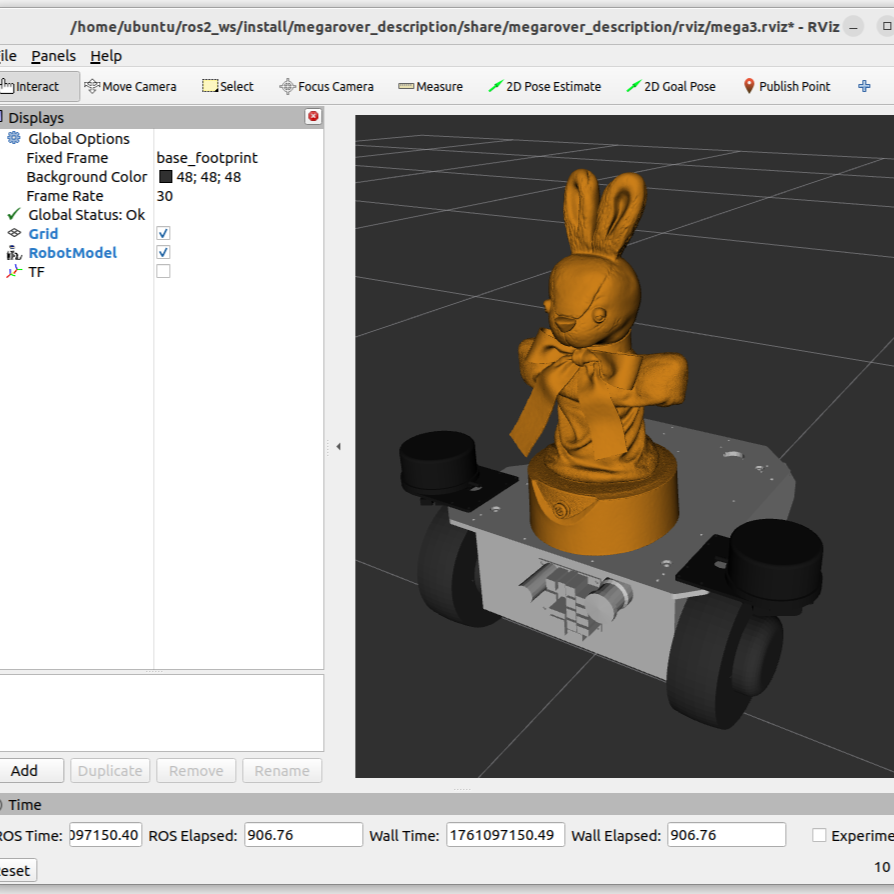
ひろちゃんをシミュレーション世界に招待しました。 公開日:2025年11月19日 スタッフ日記 こんにちは♪ Ptai です。 最近はすっかり、シミュレーション沼に浸かってしまっています。AIで作成した3Dモデルをそのままシミュレーションに使えるのは本当に便利で、気がつくと「あれも試してみよう」「これもできるかも」 […] 続きを読む
SLAM地図でナビゲーションに挑戦!次は自律走行へ 公開日:2025年11月5日 スタッフ日記商品紹介 こんにちは♪ Ptai です。前回作成した地図を使ってナビゲーションを行ってみました。 今回の地図は1本道のシンプルな構成なので、最短経路の最適化に関しては特に変化はありませんが、SLAMのときに操縦でも苦労した細い道を […] 続きを読む
台車製品のカタログもございます 公開日:2025年10月30日 商品紹介 こんにちは、THです。 研究開発用の台車ロボットには、さまざまな種類やオプションをご用意しています。 タイヤの形状、配置だったり、バッテリーの容量だったり可搬重量だったり……色々あります。 「どれ […] 続きを読む
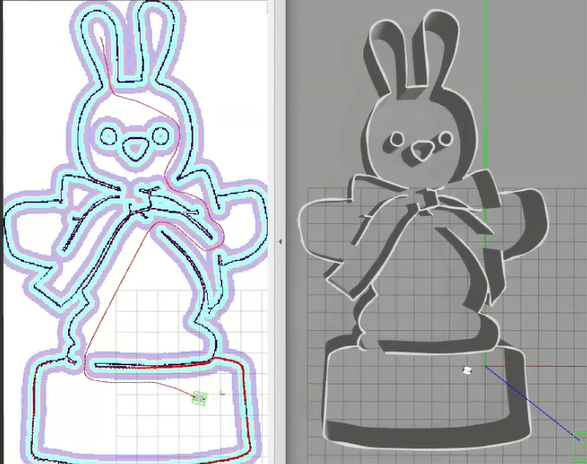
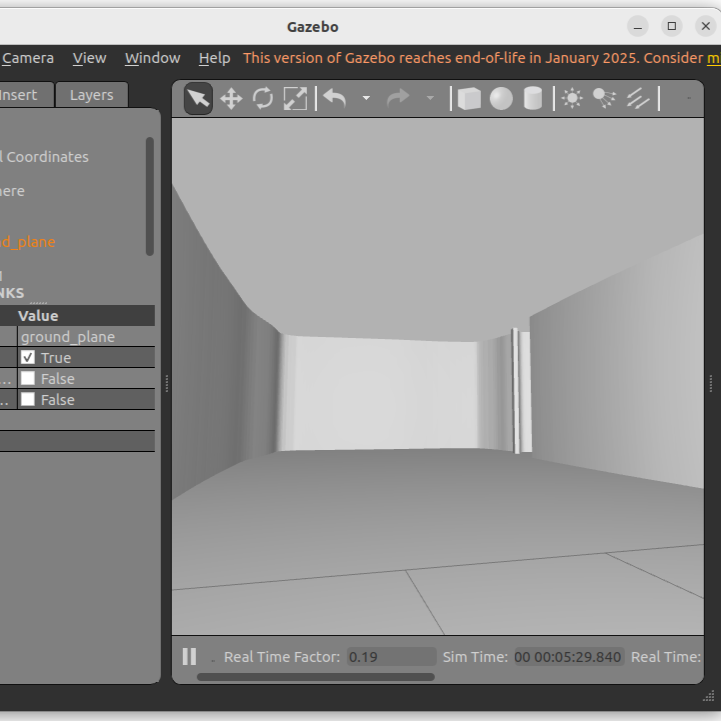
オリジナルMapをSLAMしてみました 公開日:2025年10月29日 スタッフ日記商品紹介 こんにちは♪ Ptai です。今回は、Gazeboシミュレーション環境でSLAM(自己位置推定と地図生成)を試してみました。実機を使わずに、PC上でロボットの動作を再現できるのがGazeboの面白いところ。センサーの配置 […] 続きを読む
3Dモデルで遊んでみた!URDF編集にチャレンジ 公開日:2025年10月22日 スタッフ日記商品紹介 こんにちは♪ Ptai です。 今回は、少し3Dモデルに触れてみました。 メガローバーを含むロボットモデルでは、XACRO / URDF形式のモデルを使用しています。3DプリンターなどでおなじみのSTLモデルに位置関係の […] 続きを読む
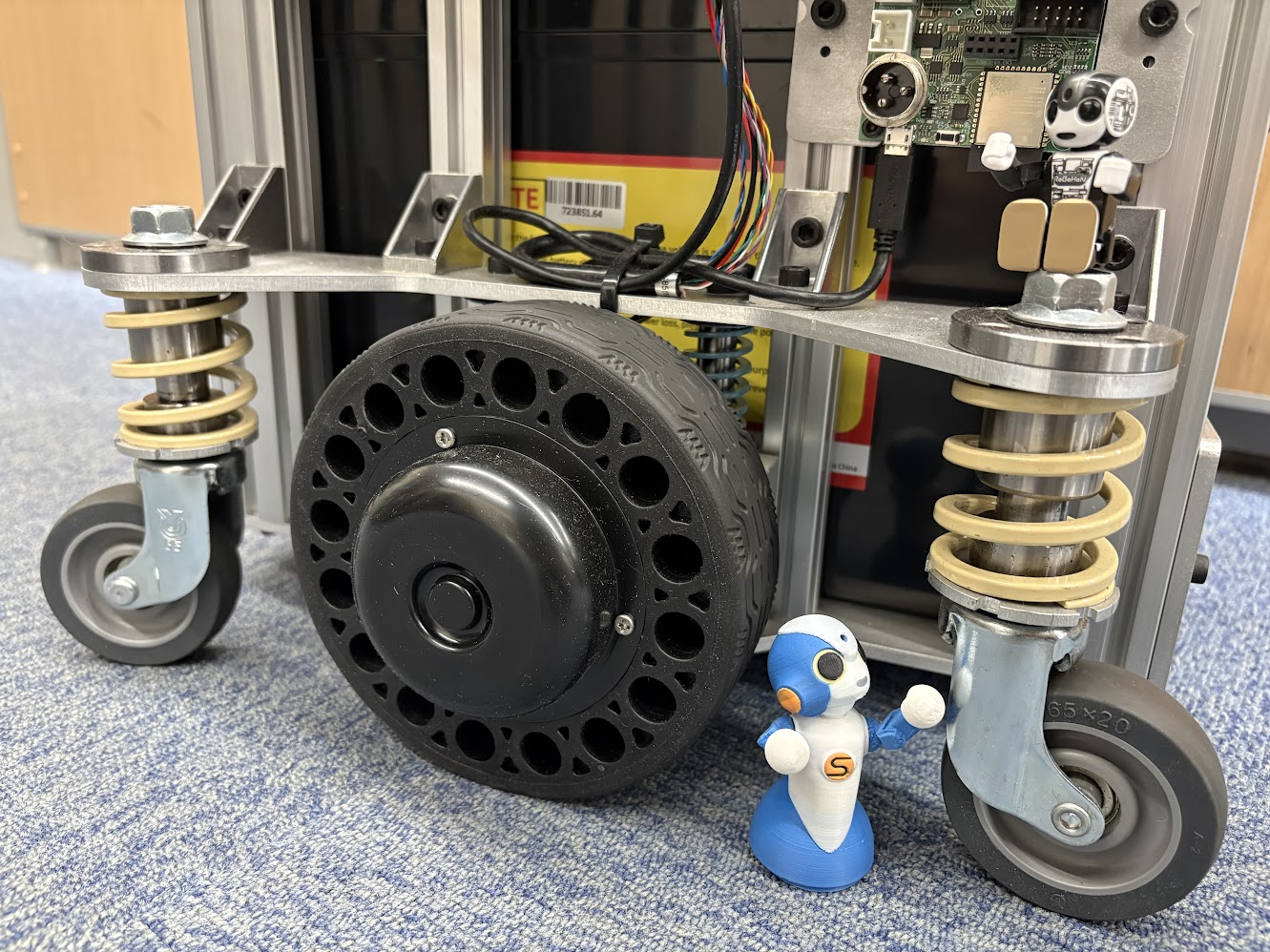
サスペンションで安定した走行を実現します 公開日:2025年10月16日 商品紹介 こんにちは、THです。 この投稿用に実際に台車に力をかけてサスペンションが動く様子を撮影しようとしたのですが、上から抑えてもびくともしませんでした……。自分の非力さを痛感しました さて、メガローバーS40A-LBには大き […] 続きを読む
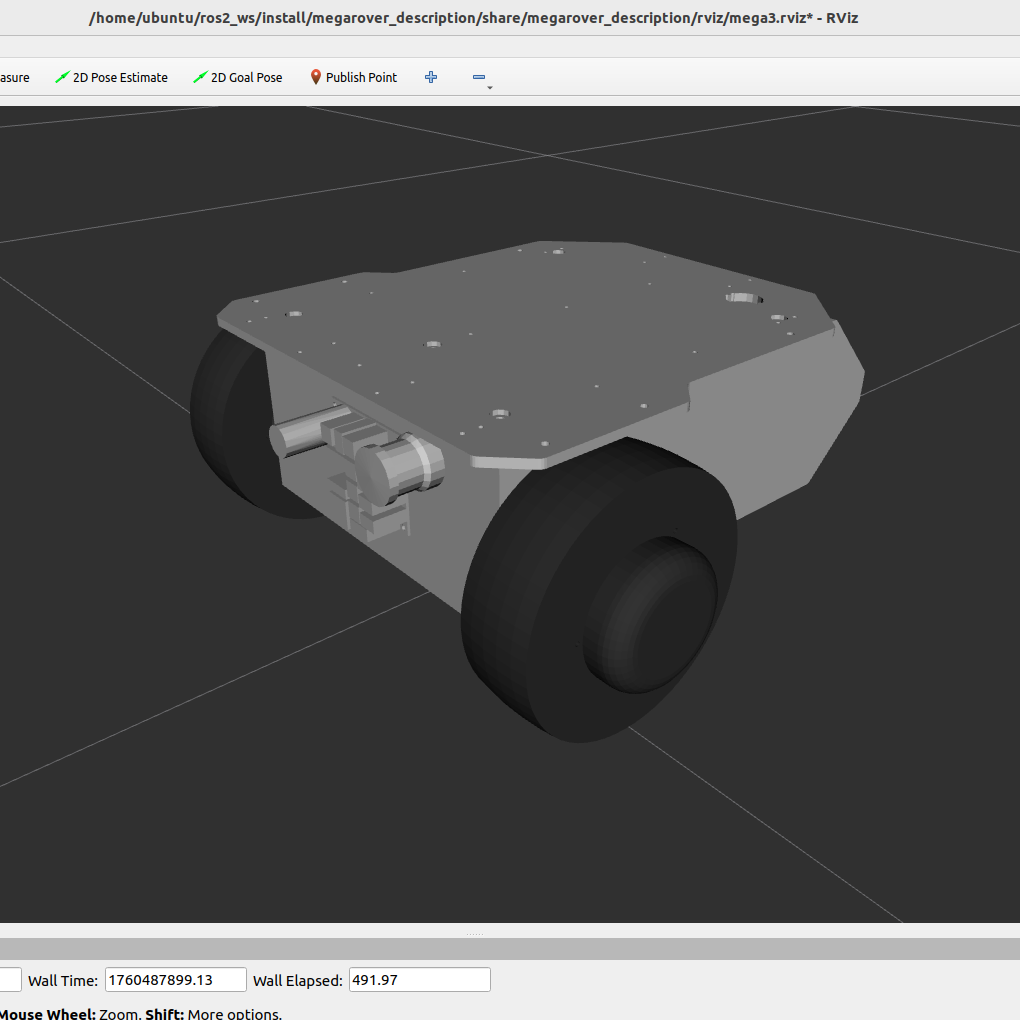
メガローバーをRvis内でお散歩中 公開日:2025年10月15日 スタッフ日記商品紹介 こんにちは♪ Ptai です。学生時代に少しだけROSを触ったことがあるのですが、最近はROS2を勉強中です。ついROS1のノリでプログラムをつなげてしまい、「それはROS2流じゃないよ」とお叱りを受けることもあったりし […] 続きを読む
バッテリー容量5倍!長時間稼働が可能なメガローバー 公開日:2025年10月9日 商品紹介 こんにちは、THです。 メガローバー S40A-LB には、1440Wh のLi-Feバッテリーが搭載されています。 基本モデルであるメガローバー Ver.3.0 と比べて、バッテリー容量は約 5 倍に拡大されました。 […] 続きを読む
「ATR OPEN HOUSE 2025 」に出展中です 公開日:2025年10月2日 スタッフ日記 こんにちは、THです。 本日から二日間、京都精華町のATRで開催される「ATR OPEN HOUSE 2025 」にヴイストンブースも出展しています! メガローバーVer.3.0のカスタム事例やCA基盤接続対応ロボット、 […] 続きを読む