こんにちは、意外とメカナム的な動きをする事の多いnishishiです。
気づいたら目の前に電柱が迫ってきていたりすることがままありますが、直前で真横にスライドして難を逃れる事が今のところ出来ています。まあ、ぼーっと歩くなよって話ではありますが。
さて、メカナムローバーVer3.0からインホイールモーター化して静音化が進みましたが、そもそもメカナムでインホイールモーターってあんまりなくって、じゃあ社内で作っちゃおう、と
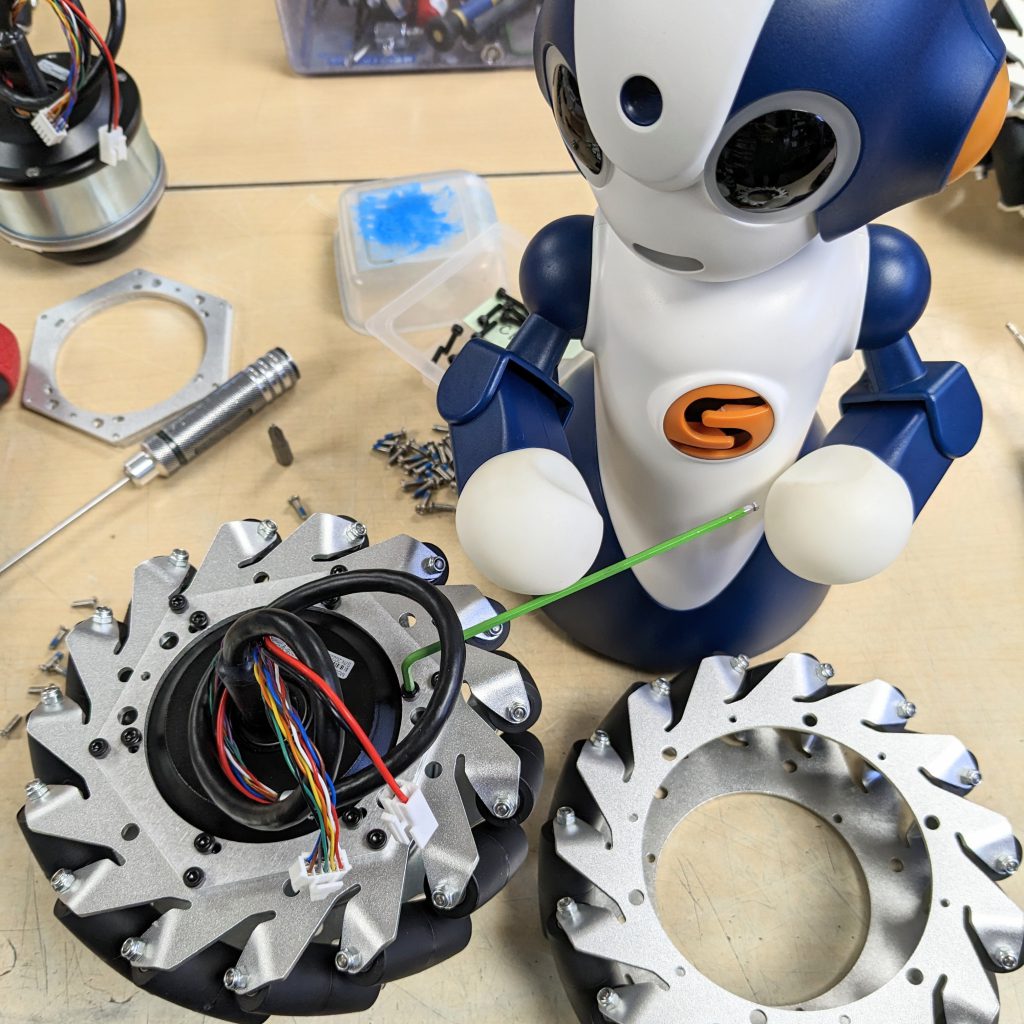
ホイールはNexusrobotの152mmアルミメカナムホイール(14101)を採用しています。これは前バージョンと一緒なんですが、そこから色々加工を施してインホイールモーターを組み込んで出来上がり、みたいな感じで爆誕したわけです。
まあまあ工数も多かったりするので作るのは大変ですが、静音化してご活用いただく事例が増えてきたのはありがたい限りでございます。
ただねぇ、メカナムである以上しょうがない、外周ローラーが接地するときの振動と音はなかなか難しいですね。
何か根本的な解決策が出るといいですね。
ではまたノシ