こんにちは♪Ptaiです。
ROS2の学習①〜④では、ライトローバーを使ってROS2の基礎を学ぶことができました。
今回は、台車ロボ「メカナムローバー」を利用して、さらにROS2について学んでいければと考えています。
現在、台車ロボット向けのROS2サンプルプログラムを準備中です。
台車ロボットにはRaspberry Piより高性能なPCを搭載できるため、ライトローバーでは実現できなかったテクニカルな運用にも挑戦できそうだと感じています。
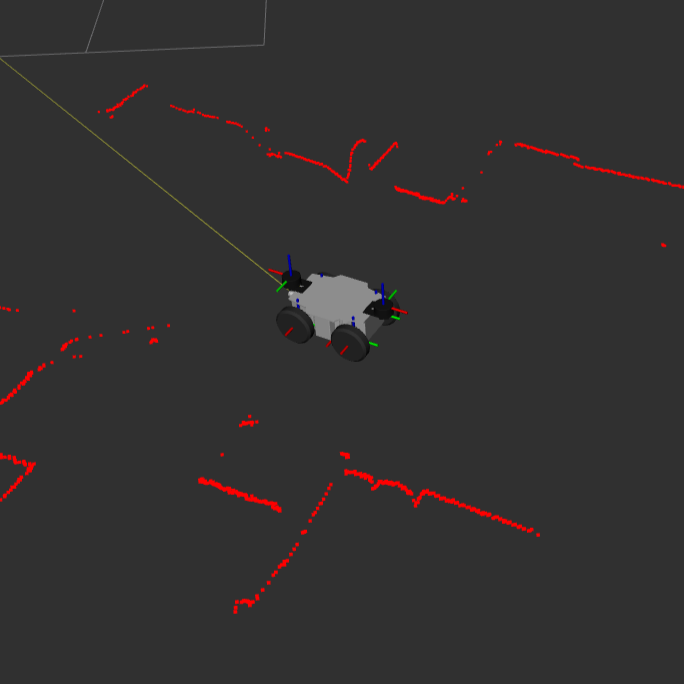
LiDARを取り付けてセンサーの動作確認も行いました。
台車ロボットとしての性能も段違いに高く、ライトローバーとの違いをこれから比較していくのがとても楽しみです。