こんにちは、babaです!
今月から毎週木曜日にテーマに沿って技術的な記事を更新することになりました!
普段見ることのないちょっとディープな話が見られると思いますので楽しみにしていてください!
本日の内容は、6月1日にFacebookの方に投稿したものですが、ブログには投稿していなかったので改めて投稿します。
今月のテーマは「アカデミック スカラロボット」です。
https://www.vstone.co.jp/products/scara_robot/index.html
この「アカデミック スカラロボット」は、ロボットの基本的な制御技術を学習することができるロボットプログラミング教材です。
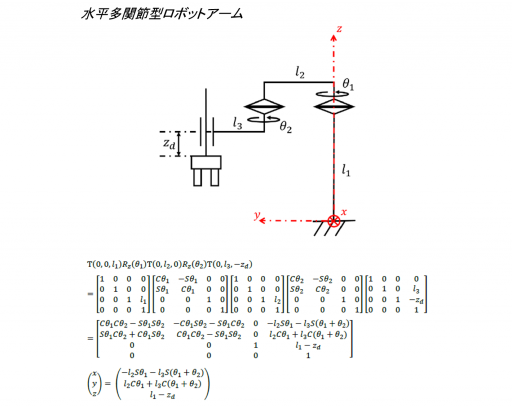
このロボットは、水平多関節(SCARA)型ロボットアームというものに分類されます。
このタイプのロボットアームは垂直多関節型と呼ばれるタイプのロボットアームに比べて、関節角度から手先の位置を求めることが簡単にできるという特長があります。
というわけで、同じ軸数の垂直多関節型ロボットと水平多関節型ロボットにどれくらい差が出るのか、実際に計算式を算出して比較してみました!
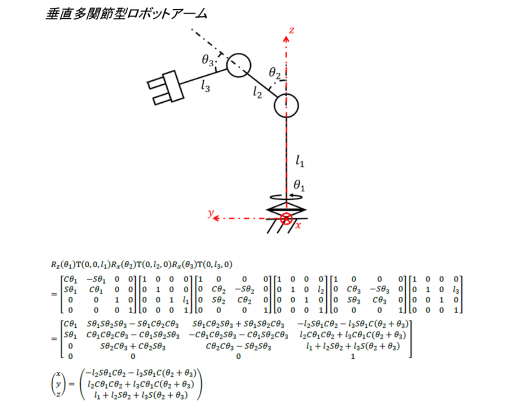
...垂直多関節型の方はすごいことに
やはり比較的簡単に計算可能な水平多関節型のロボットアームは、基本的な運動学・逆運動学の勉強にちょうどいいのではないでしょうか。
それではまた!



