こんにちは♪ Ptai です。
今回は、少し3Dモデルに触れてみました。
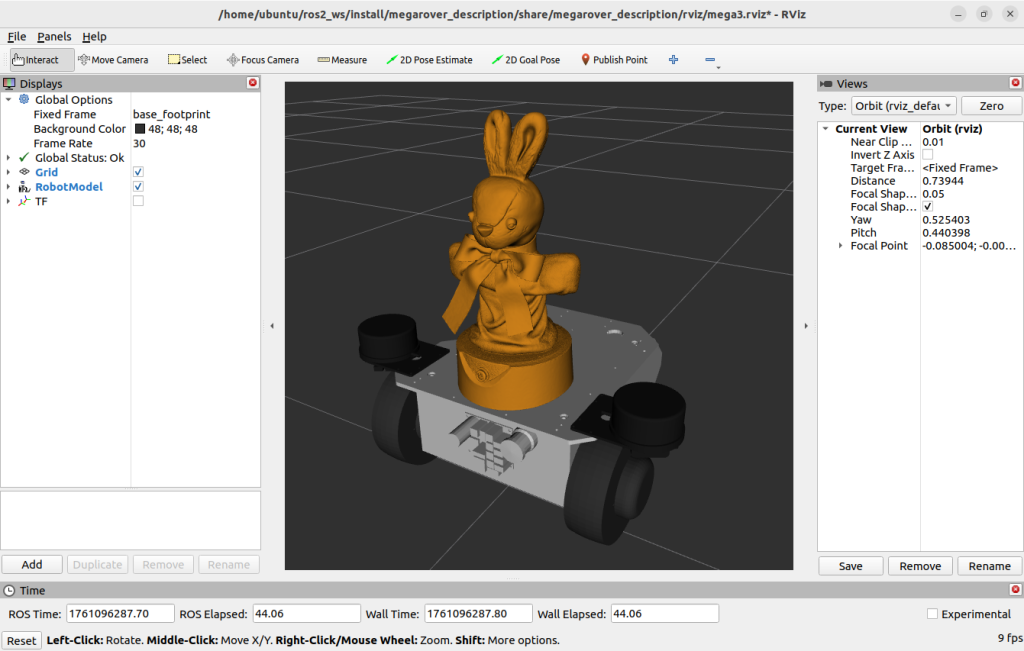
メガローバーを含むロボットモデルでは、XACRO / URDF形式のモデルを使用しています。
3DプリンターなどでおなじみのSTLモデルに位置関係の情報を与えて、ロボットの形を定義しているんです。
試しに、オプション品のLRFセンサーの取り付け位置を変更してみたり、自分で3Dスキャンしたモデルを読み込んでみたりしました。
こうして3Dモデルを用意すれば、オリジナルモデルも作れちゃいます♪
ヒト型ロボットのモデルですか……
最近はヒューマノイドロボットのシミュレーションも話題に上がっているので需要あるんでしょうか?
ただ、部品点数が増えると構造もどんどん複雑になっていくのが悩ましいところですが、
いつかは挑戦してみたいですよねぇ