Arduino互換のVS-RC202と、ロボット制御用ミドルウェアROSを使った、パンチルトカメラの作例についてご紹介します!
VS-RC202のご購入はコチラ→ https://goo.gl/U4PZMG
スギ花粉の飛散が始まったというニュースを見ました。花粉が目にくるmorimoriです。
前回の記事で、ROSを使ってVS-RC202を制御するための大まかな流れについて解説しました。見てない方はコチラ→ https://goo.gl/2ZLzn2
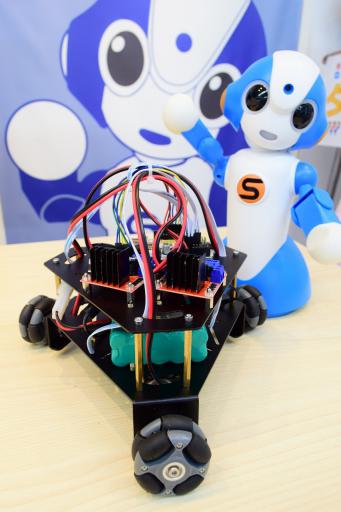
パンチルトカメラはROSを使いつつ、VS-RC202で作成できるロボット的なものとして、かなりお手軽な一品です。
基本的にはカメラとサーボモータ2個(ヨー軸、ピッチ軸用)があればできます。それぞれを接続するためのフレームパーツなども必要となりますが、3Dプリンタで作れる設計データをHP(https://goo.gl/SiQYEL )にて配布していますので、プリントサービス等を使って手に入れることもできます。
せっかくROSを使うのですから、何かROSらしいことをしましょう。というわけで、公開している作例には「ARマーカーを追従する機能」を載せてみました。
画像解析により、カメラに写ったARマーカーの位置を計測し、視野の外に出ないようにサーボをコントロールしています。実際の動きは映像でご確認ください。
この機能を持ったパンチルトカメラロボットを自分で一から開発しようとすると、かなり大変です。特に画像解析や通信に関係する部分は、ライブラリがあったとしても環境依存の部分があったりと、トラブルになりがちです。しかしROSならその開発負担を大きく削減することができます。
この作例を開発する際にmorimoriが実際に書いたのは、ARマーカーの位置情報からサーボの動作を算出する部分と、算出されたサーボ角度を実際に出力する部分のみ。画像解析や通信に関係する部分は既存のROSパッケージを使用することで、ノートラブルで実装できました。
ROSを使えば、VS-RC202の活用幅が大きく広がりますよ! ROSの基礎を理解するまではちょっと大変かもしれませんが、得られる恩恵はとても魅力的です。