Gazeboなんかで使うためのロボットのモデルを作っていると、どこまでディティールにこだわるべきかで結構悩みますよね。
すごい細部にまでこだわっても結局処理が重くなるだけだったり、かといって粗すぎては再現性のあるシミュレーション結果が得られません。
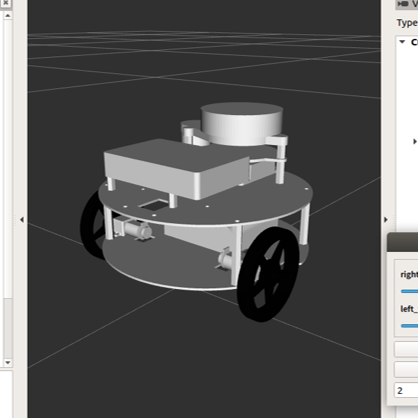
何の話かといいますと、ライトローバーのGazeboモデルができました、という話です。
見た目も衝突判定も適度に粗くしてあるので、数世代前のCPU、グラボなしとかでもまぁまぁ動くと思います。
Githubのlightrover_descriptionから拾えますので、ぜひ遊んでみてください。