こんにちは、junjunです!
毎週木曜日の技術的小話のコーナー、今月からテーマが変わりまして
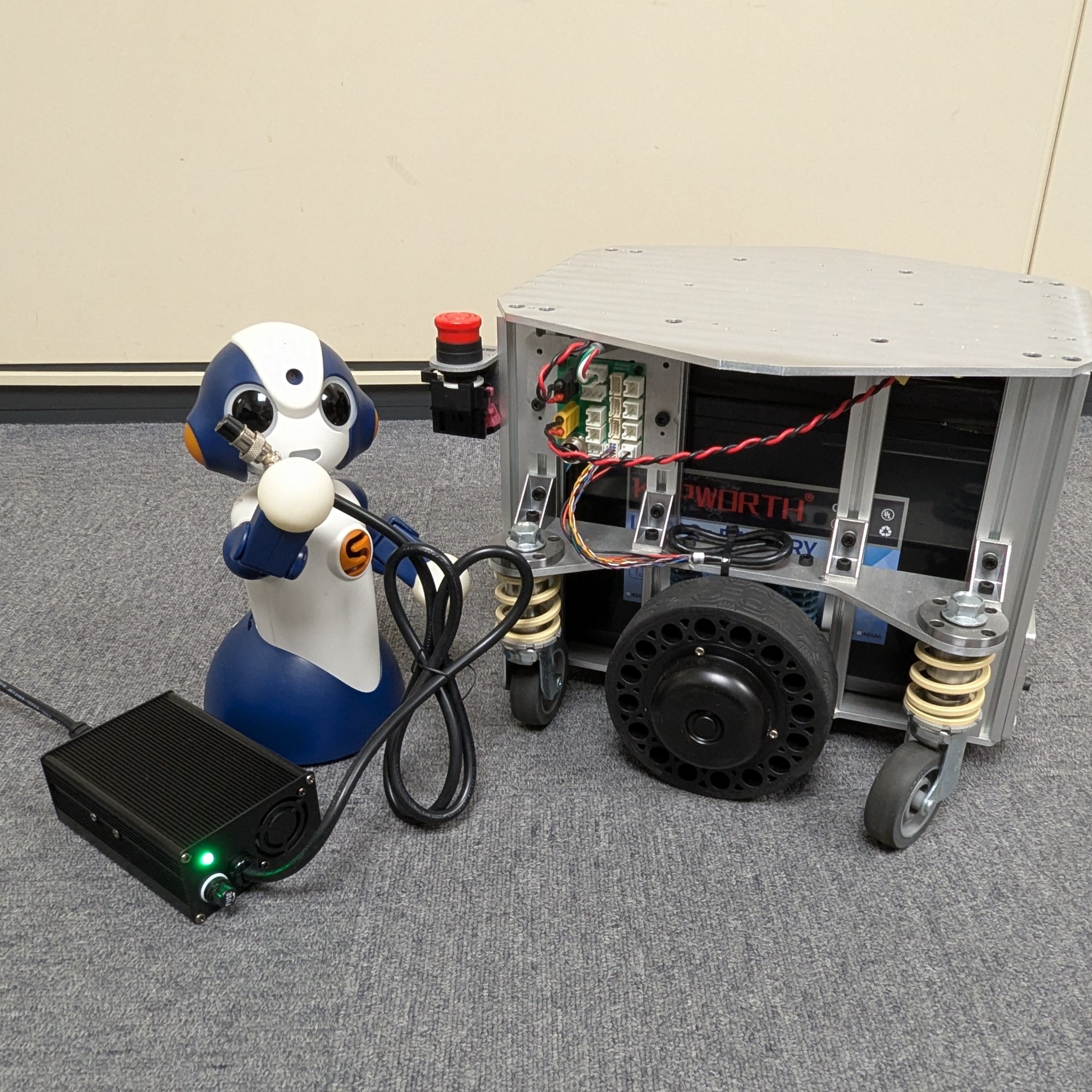
「Nexus Robot 3WDオムニホイールロボット(10014)」となります。
本日は「3輪台車ロボットの制御方法を簡単に解いてみた」です。
商品についての情報はこちらをご覧ください。
3WDオムニホイールロボットは、その名の通り
駆動輪にオムニホイールを3つ使った全方向移動が可能な台車ロボットになります。

Arduino(ATMega328)を搭載しているため、Arduinoの開発経験者の方なら
いつもの開発環境ですぐに制御にかかれると思います。
恥ずかしながら私はPIC開発の経験はあれどもArduinoは未経験でして…
ただいま勉強中の身であります!
…というわけで、今回は台車ロボット制御の本質的な部分に触れてみようと思います。
自転車や自動車など、一般的な車といえば、ホイール全てがそれぞれ同じ方向を向いているイメージを
持たれるかと思いますが、このロボットはそれと比べるとかなり特殊な形状をしています。
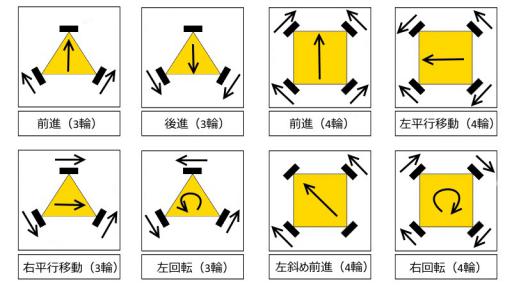
3輪台車ロボットでの移動方法は図に示されているように、決められた方向にモータを回すことで、
前進や平行移動、旋回など自由に動き回ることが可能です。
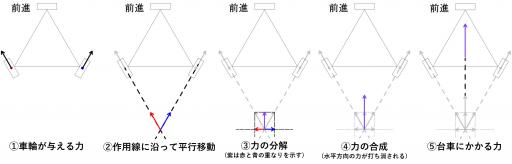
しかし、例えば前進にしても
「逆ハの字にホイールがついているのに、それでなぜ前進できるのか」
と疑問も持たれてもおかしくないと思います。
そんな時には物理の出番です。中高時代に学ぶ「力の分解・合成」を使うことで、
力学的に台車が前進することを導き出せます!(ステップを細かく図にしてみました)
「今勉強していることなんて、将来何に使うんだ」なんて私も学生時代よくつぶやいていましたが(←)、
こんな風に、しっかりと身になることもあるんだなぁと、再認識しましたw
他の移動方法についても、パズル感覚でぜひ解いてみてくださいね!!