こんにちは♪Ptaiです。
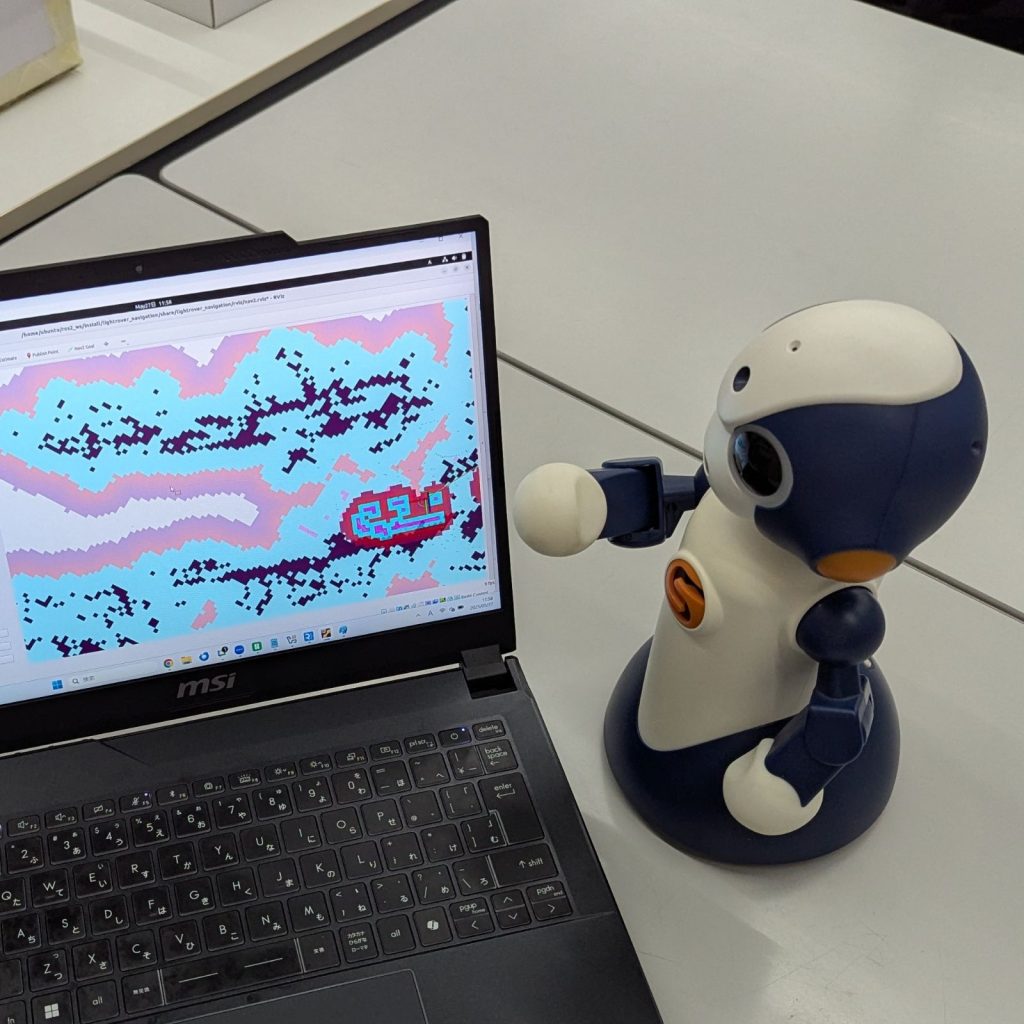
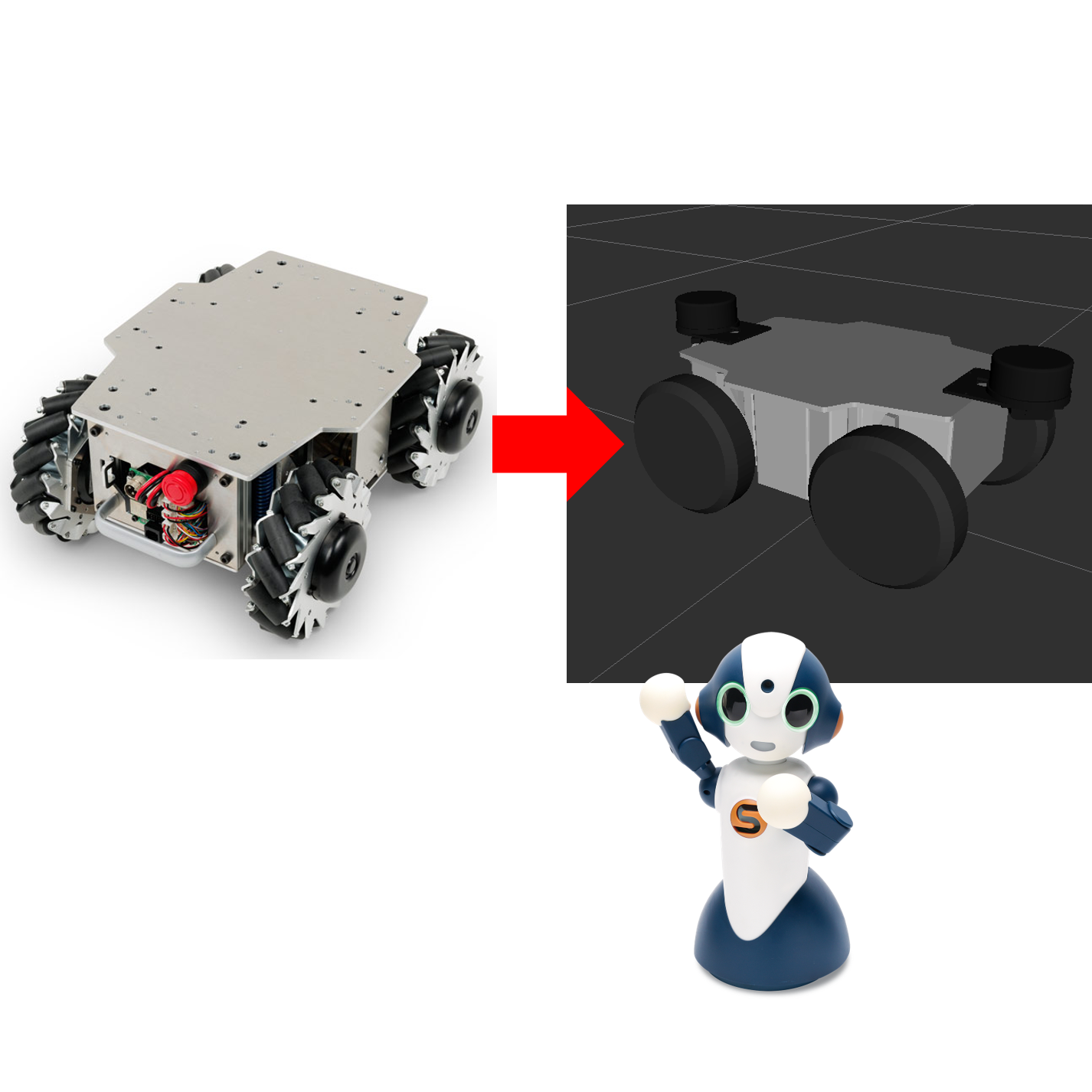
ライトローバーを使用してROS2の学習を行っています。学習②では社内でSLAMを行い地図を作成しました。今回は作成した地図を使用してナビゲーションプログラムを試してみました。
ナビゲーションプログラムの動作確認を行った後、「さぁ撮影をして情報発信するぞ」ってタイミングで社内のちょっとした模様替えを行ってしまったため作成した地図と大きく変わってしましました;-;
模様替え前の地図になりますが読み込んだ際の写真をパシャリ☆
ROS2学習も後半戦に入り次回はカメラを利用した追従プログラムの学習に移ります。
カメラを利用した追従プログラムはROS1のものになるのでROS2に対応させる必要がありますね…
これまでの学習で学んだことを応用して頑張ってROS2に対応させます♪
では、次回「追従プログラムの確認」へ…