こんにちは!
夏の日差しにめっぽう弱い、morimoriです!
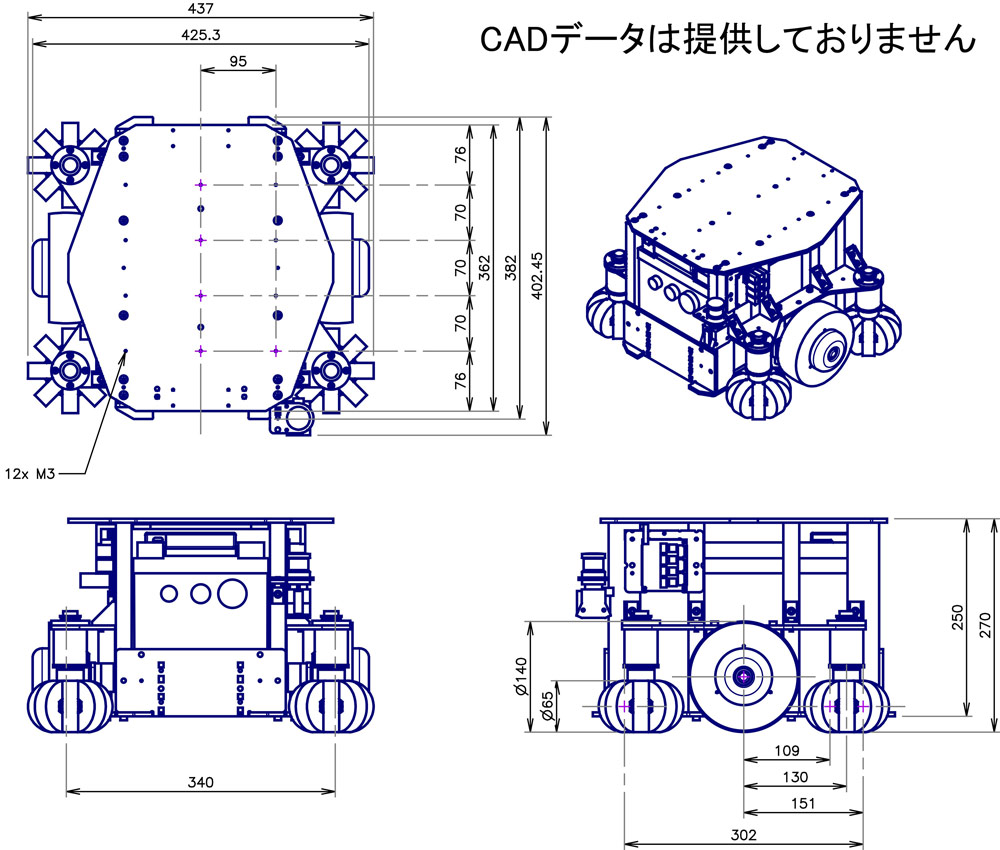
本日のテーマは「見よ! これがオムニホールロボットの真骨頂。Nexus robot 3WDを自由自在にコントロールしてみた」です。
Nexus robot 3WDについてはコチラ↓
http://www.vstone.co.jp/products/nexusrobot/index.html
さてさて、3回目になるNexus robot 3WDですが、私、すごいことに気が付いてしまいました。
なんと、Nexus robot 3WDの特徴である「オムニホイールを活かした動作」の様子をまったくお届けしていないじゃあないですか( ゚Д゚)?!
というわけで今回は、オムニホイールならではの動きを中心に、Nexusが元気に動き回る動画をお届けします。
オムニホイールロボットの動作の特徴は、「いつでも360°好きな方向に移動したり回転したりできること」です。専門用語では”ホロノミック系”と言ったりしますので、なんかちょっと自慢したりしたい時のために覚えておきましょう(笑)
(動画が動かない場合、フルスクリーンモードをお試しください)
動画中のNexus Robot 3WDはホロノミックな性能を発揮するために、三角関数を用い、与えられた任意の角度に、任意の速度で移動できるようなプログラムを実装しています。こう書くと難しく聞こえるかもしれませんが、実際には20行程度の非常に短いシンプルなプログラムです。
皆さんもぜひ、Nexus robot 3WDでホロノミックなオムニホイールロボットの制御に挑戦してみてください!
使用したスケッチはコチラ
———————————————————
#include
#include
unsigned long currMillis=0;
SONAR sonar11(0x11),sonar12(0x12),sonar13(0x13);
#define MOTOR1_E 9
#define MOTOR2_E 10
#define MOTOR3_E 11
#define FORWORD 0
#define STOP 1
#define BACK 2
//**********************************************//
unsigned char motor1_Ctrl[3] = {60,45,30};
unsigned char motor2_Ctrl[3] = {60,45,30};
unsigned char motor3_Ctrl[3] = {60,45,30};
unsigned short distBuf[3];
Servo wheels;
int sonarUpdate() {
static unsigned char sonarCurr=1;
if(sonarCurr==3) sonarCurr=1;
else sonarCurr=0;
if(sonarCurr==1) {
distBuf[1]=sonar12.getDist();
sonar12.trigger();
sonar12.showDat();
} else if(sonarCurr==2) {
distBuf[2]=sonar13.getDist();
sonar13.trigger();
sonar13.showDat();
} else {
distBuf[0]=sonar11.getDist();
sonar11.trigger();
sonar11.showDat();
}
return sonarCurr;
}
//*************************************************//
void goAhead(){
analogWrite(MOTOR1_E, motor1_Ctrl[STOP]);
analogWrite(MOTOR2_E, motor2_Ctrl[BACK]);
analogWrite(MOTOR3_E, motor3_Ctrl[FORWORD]); // Revese
}
//*************************************************//
void getBack(){
analogWrite(MOTOR1_E,motor1_Ctrl[STOP]);
analogWrite(MOTOR2_E,motor2_Ctrl[FORWORD]);
analogWrite(MOTOR3_E,motor3_Ctrl[BACK]);
}
//************************************************//
void turnLeft(){
analogWrite(MOTOR1_E,motor1_Ctrl[FORWORD]); //Revese
analogWrite(MOTOR2_E,motor2_Ctrl[BACK]); //forward
analogWrite(MOTOR3_E,motor3_Ctrl[STOP]); //forward
}
void turnRight(){
analogWrite(MOTOR1_E,motor1_Ctrl[BACK]); //forward
analogWrite(MOTOR2_E,motor2_Ctrl[STOP]); //Revese
analogWrite(MOTOR3_E,motor3_Ctrl[FORWORD]); //Revese
}
//************************************************//
void RotateRight(){
analogWrite(MOTOR1_E,motor1_Ctrl[BACK]);
analogWrite(MOTOR2_E,motor2_Ctrl[BACK]);
analogWrite(MOTOR3_E,motor3_Ctrl[BACK]);
}
//*************************************************//
void RotateLeft(){
analogWrite(MOTOR1_E,motor1_Ctrl[FORWORD]);
analogWrite(MOTOR2_E,motor2_Ctrl[FORWORD]);
analogWrite(MOTOR3_E,motor3_Ctrl[FORWORD]);
}
//**************************************************//
void judge(){
if(distBuf[0]>=30){
if(distBuf[1]<=10 && distBuf[2]>10) turnRight();
else if(distBuf[2]<=10 && distBuf[1]>10) turnLeft();
else if(distBuf[1]<=10 && distBuf[2]<=10) RotateLeft();
else goAhead();
}else RotateLeft();
}
//**************************************************//
void allStop(){
analogWrite(MOTOR1_E, motor1_Ctrl[STOP]);
analogWrite(MOTOR2_E, motor2_Ctrl[STOP]);
analogWrite(MOTOR3_E, motor3_Ctrl[STOP]);
}
//*************************************************//
//void (*motion[8])()={ goAhead,RotateLeft,turnRight,RotateLeft,turnLeft,RotateLeft,judge,allStop}; //change the
void (*motion[8])()={ goAhead,RotateLeft,turnRight,RotateLeft,turnLeft,RotateLeft,goAhead,allStop}; //change the
void demowithSosars(){
unsigned char sonarcurrent=0;
if(millis()-currMillis>50/*SONAR::duration*/){ //judge if the time more than SONAR::duration;
currMillis=millis();
//sonarcurrent= sonarUpdate(); //if the requirement was ture call the function;
//Serial.println(distBuf[sonarcurrent]) ;
}
sonarUpdate();
//if(sonarcurrent==3){
if(distBuf[0] > 10){
analogWrite(MOTOR2_E, motor2_Ctrl[BACK]);
analogWrite(MOTOR3_E, motor3_Ctrl[FORWORD]);
//wheels.write(83);
}
else{
analogWrite(MOTOR2_E, motor2_Ctrl[STOP]);
analogWrite(MOTOR3_E, motor3_Ctrl[STOP]);
//wheels.write(83);
}
//delay(200);
/*unsigned char bitmap = (distBuf[0] < 20);//front
bitmap |= (distBuf[1]<20) <<1; //left
bitmap |= (distBuf[2]<20) <<2; //right:
Serial.print(“bitmap=”);
Serial.println(bitmap,DEC);
(*motion[bitmap])();*/
//}
}
void demoaction(){
for(int i=0;i<7;i++){
(*motion[i])();
Serial.println(i);
delay(10000);
}
}
//*************************************************//
void setup() {
TCCR1B=TCCR1B&0xf8|0x04;
TCCR2B=TCCR2B&0xf8|0x06;
//pinMode(MOTOR1_E, OUTPUT);
pinMode(MOTOR2_E, OUTPUT);
pinMode(MOTOR3_E, OUTPUT);
//wheels.attach(MOTOR1_E);
//wheels.write(83);p
delay(2000);
SONAR::init(); //call the init() from SONAR.h;
//Serial.begin(9600) ;
}
void loop(){
demowithSosars();
//demoaction();
}
—————————————————
ご質問等は受け付けておりませんのであしからず!