こんにちは、車の安全装置の音にビビるnishishiです。
前の車が発進したのに自分が動かないと、ぴぴぴって警告音を発してくれる賢い車なんですが、その機能を忘れたころになるんで毎回ビクッてなります。まあ気づかせるための機能なんだから、いい仕事してるってことでいいですかね?
さて、測距センサと言えば赤外線とか超音波とかありますが、ライトローバーにはLiDARが搭載されてます。
ぐるぐる回りながらビームを発して、跳ね返ってきた情報を元に周囲のマッピングをしたりするものですよね。
Sotaの曲面なカラダに当てるとこんな感じ。
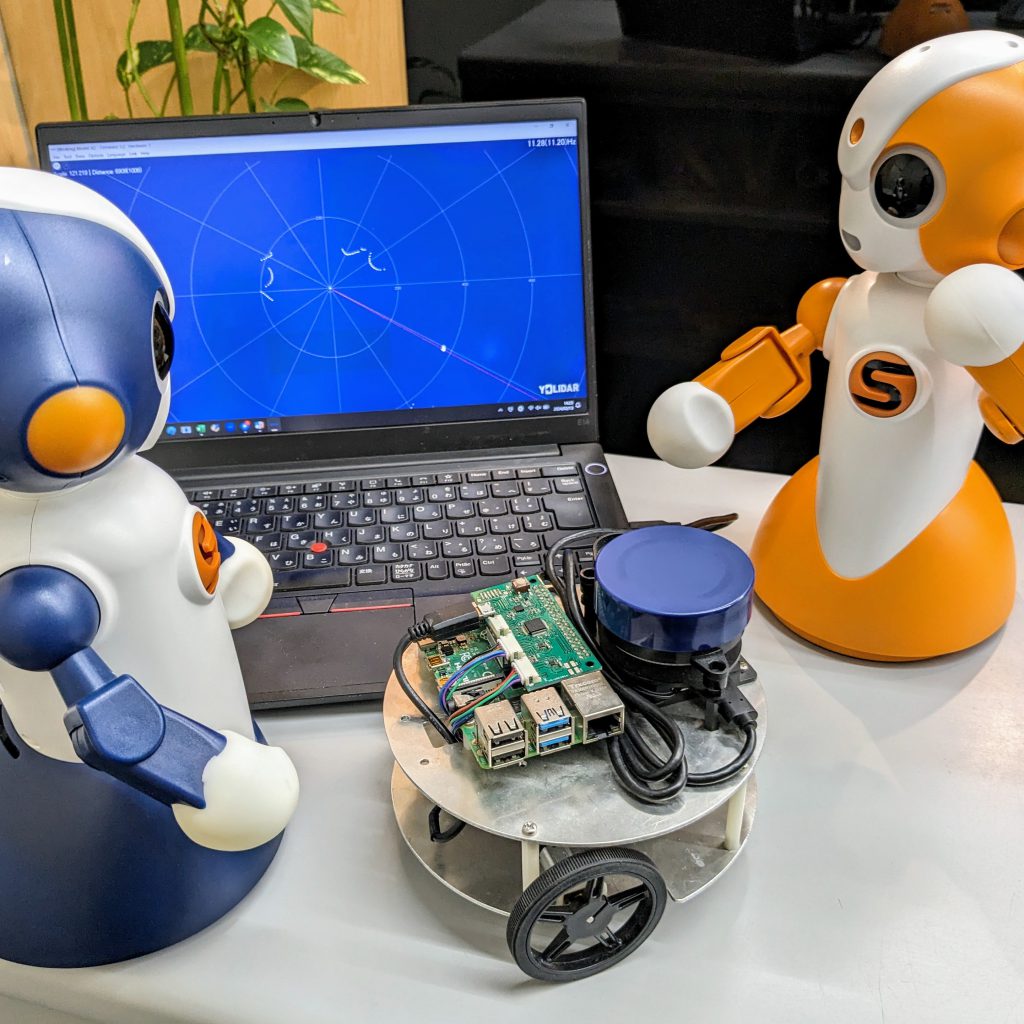
手と胴体がしっかり映し出されているのが見えますか?
こんな感じで周囲確認しながらマップを作って、自律移動をしたり、なんてことを勉強できたりします。
ROSの入門にぜひぜひご活用ください!
ではまたノシ