こんにちは♪Ptaiです。
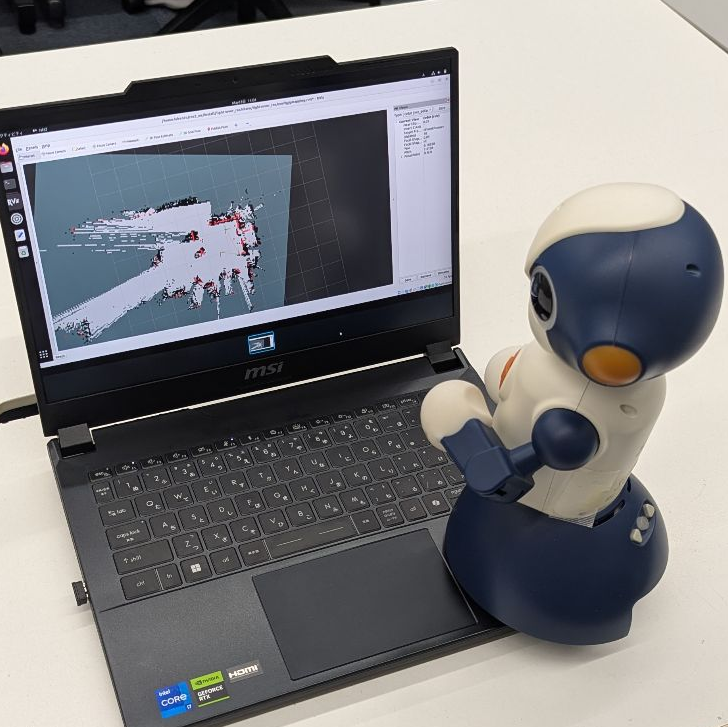
ライトローバーとノートパソコンを通信させて事務所の地図を作成しました。
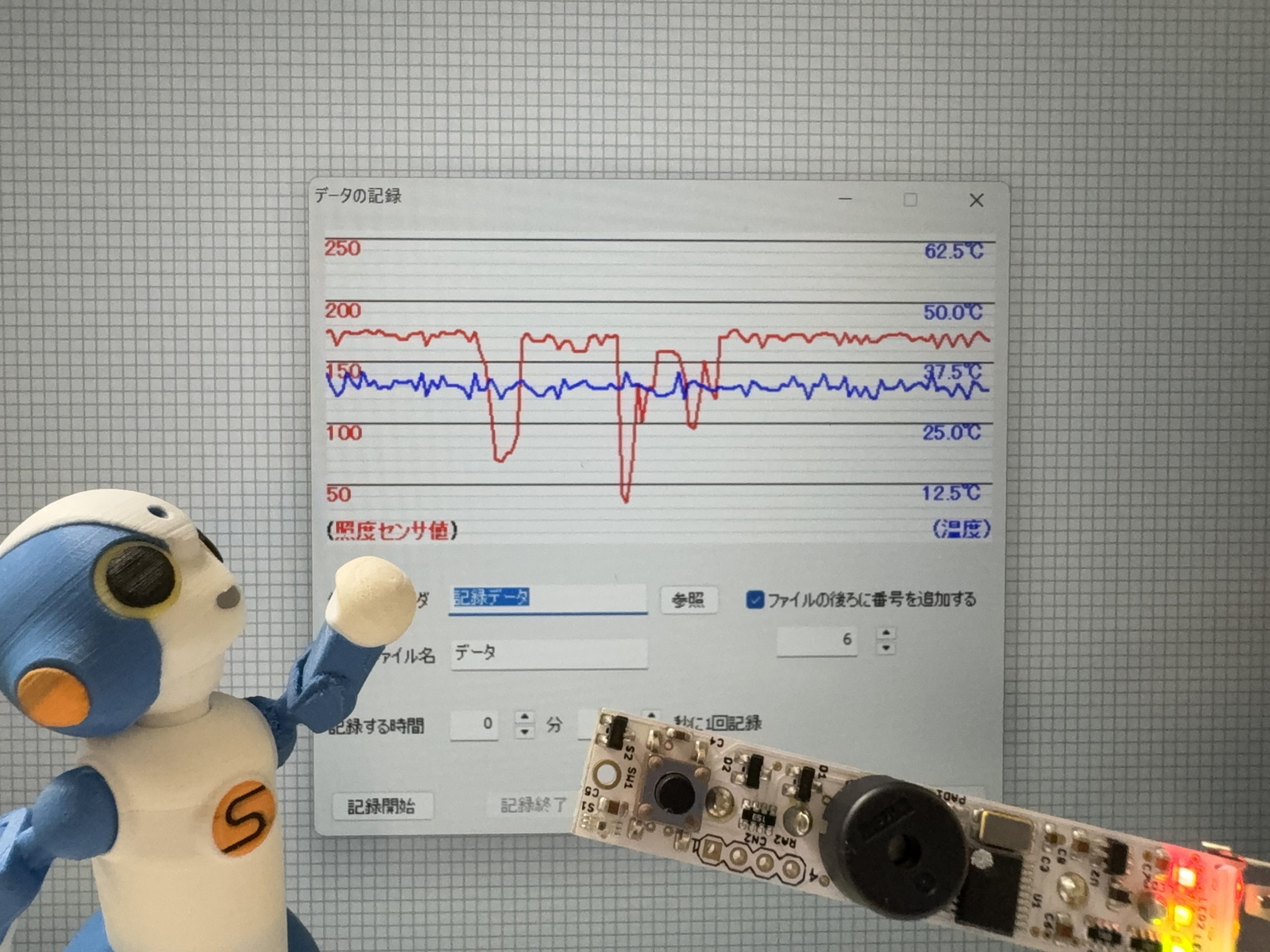
ライトローバーではセンサーでロボット周辺環境を測定、ノートパソコンではセンサー情報を整理して描画処理を行う分散処理を試しました♪
地図が用意できましたので、次はナビゲーションシステムの確認ができそうです。
配膳ロボを目指してSota君と勉強頑張ります!
お買い得情報や技術に関する解説情報などをロボット専門店のスタッフが日々更新しております!プログラミング在宅学習用にyoutubeにて解説動画も公開中!