メガローバー Ver2.0にWi-Fi機能が搭載されていることは昨日お話させていただきました。昨日はサンプルプログラムをタブレットで動かしましたが、せっかくなのでSotaと連携させてみようと思います!
メガローバー Ver2.0の詳細はここからチェック!!
メガローバー Ver2.0のWi-Fiサンプルプログラムは、簡単に言うと特定のURLにアクセスがあった際、アクセスされたURLごとに決まった動作をするというものです。
ということは、その特定のURLにアクセスするようなプログラムさえ作ってしまえば、メガローバー Ver2.0はサンプルプログラムのままでもWi-Fi経由で制御ができるようになるはず…
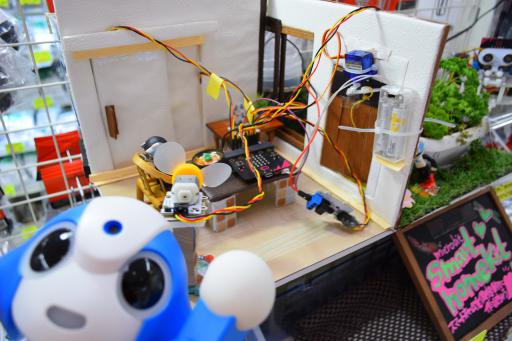
ということでSotaからメガローバー Ver2.0を制御してみます。
Sotaの左右の肩関節の角度を読み取って、その角度に合わせてメガローバーVer2.0が動くようにします。ただSotaにはHTTPリクエストをするためのブロックが用意されていないので、自由記述ブロックを使って自分で書きましょう。その辺はネット検索で調べてみてください。
今回はSotaをコントローラにするような感じにしましたが、メガローバーの上に乗る電源を用意してあげれば、Sotaとメガローバー Ver2.0を使って案内ロボットシステムみたいなものも作れるんじゃないでしょうか?
興味がある方はぜひお試しあれ。