こんにちはー!
最近100均のワイヤーネットで作る壁掛け収納の便利さに感動しているbabaです。
昨日に引き続き、今日もワイヤレスロボット制御ボード「VS-RC202」の作例をご紹介します。
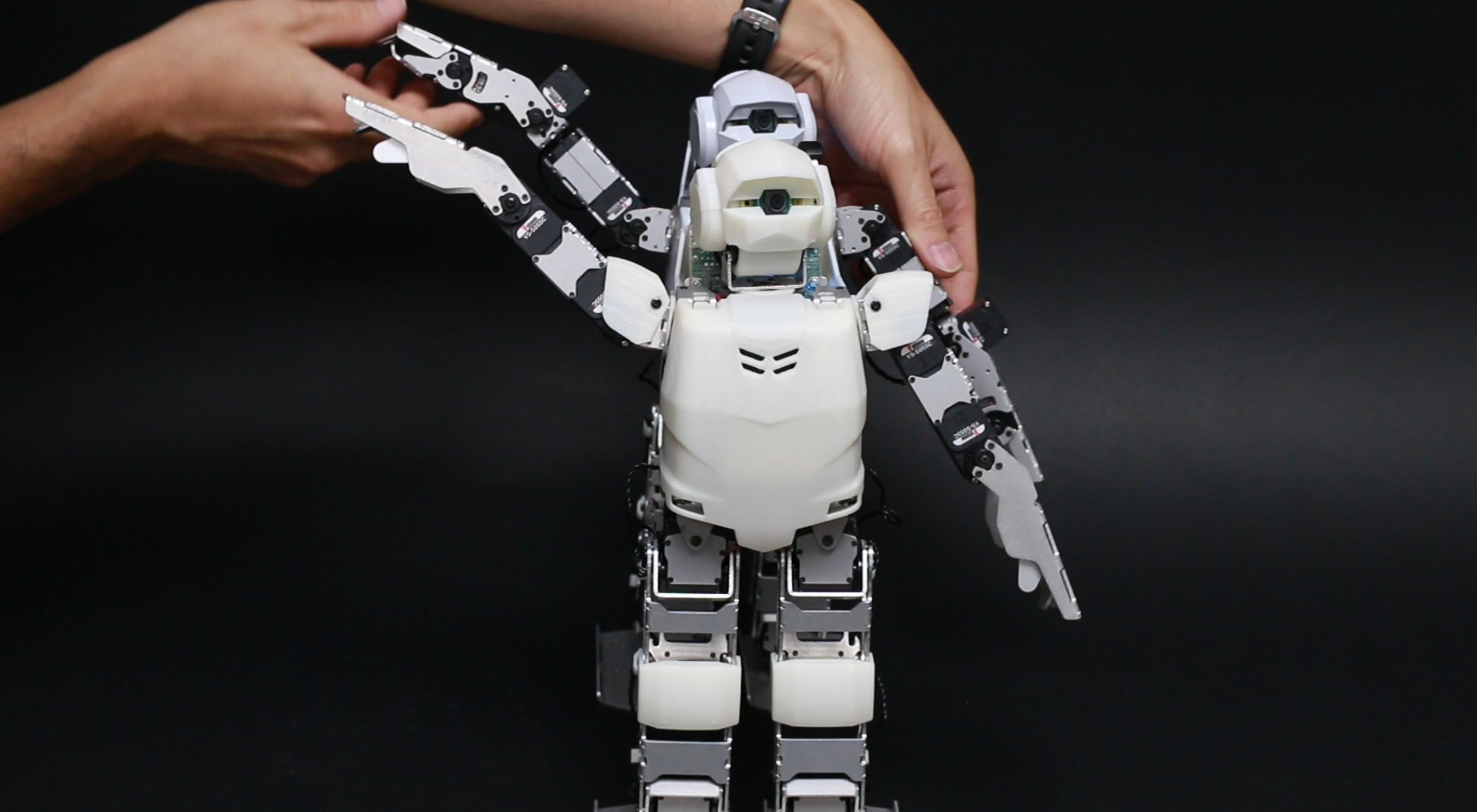
今日は、ロボットアームの作例をご紹介します。
VS-RC202の詳細はここからチェック!!
このロボットアームは4自由度の垂直多関節型のアームです。以前、弊社のアカデミックスカラロボットをご紹介しましたが、あちらは名前の通り水平多関節型のロボットアームでした。また、このロボットアーム、普通の水平多関節とは違い、平行リンク機構(パラレルリンクとも言います)を使用しています。通常の水平多関節型のロボットアームは、関節部分にモータを取り付ける必要があり、根元のモータが手先のモータの重さを支える必要があるのですが、この平行リンク機構を用いると、手先の関節のモータも根元に置くことができ、根元のモータの負担を減らすことができます!
ただし制御は複雑になります。ぜひ皆さん運動学、逆運動学の計算に挑戦してみてください。ちなみに僕は学生時代に同じような平行リンクのロボットアームの運動学・逆運動学の計算をしたことがあるのですが、二度とやりたくないです(笑)
さて、そんな作例のロボットアーム。サンプルプログラムではシリアル通信を使って有線で制御しているのですが、「VS-RC202」はワイヤレスロボット制御ボードです。そうワイヤレスなんです。
ということでサンプルを改造してWi-Fi経由で制御できるようにしてみました!
こういう改造も簡単にできるのも「VS-RC202」の魅力ですね。
皆さんもぜひ遊んでみてください!
来週はmorimoriさんが最後の作例、パンチルトカメラのご紹介をしてくれる予定です。この作例、他の二つの作例とは勝手が違うようで…?
というわけで次回もお楽しみに!!