はじめまして、junjunです!
毎週木曜日の技術的お話しのコーナー、今月のテーマは「アカデミックスカラロボット」です。
スカラロボットについてはここからチェックできます。
前回まで、順(逆)運動学についての投稿がありましたが…
私は学生時代、まさにこの製品を通して運動学を学ばせて頂いた一人です!!
今回は学問的な内容というよりは、どの辺りを活用させてもらったのか
半分体験談のようなことを書かせて頂こうと思います。
製品情報ページにもあるように、アカデミックスカラロボットは2通りの制御方法に対応しています。
一つはシミュレーター機能が搭載されたモーションエディタ「SCARA Programmer」、
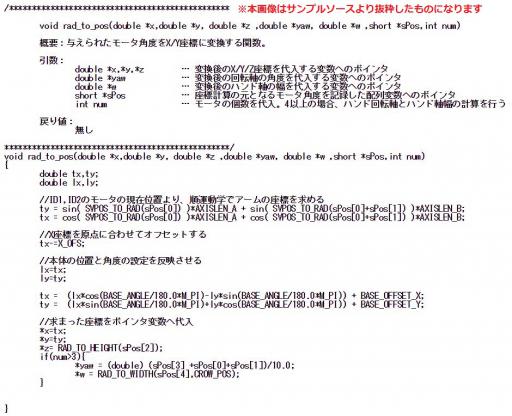
そしてもう一つはC++言語による制御です。
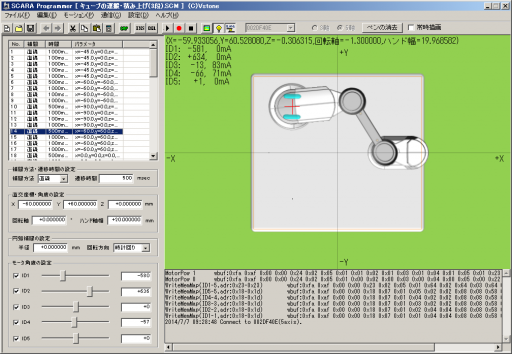
SCARA Programmerは直感的に操作できるため、ロボット制御が未経験の方にもお勧めですが、
私はC++言語による制御用のサンプルソースが大いに役立ちました!
私の場合は当時に簡単なC言語の読み書きやロボットの制御については経験があったため、
比較的ハードルも高くない状態で学び始められました。
サンプルソースは目的ごとに全部で4つに分かれており、さらに日本語でのコメントが丁寧に書かれているため、C++に触れたことのなかった私でもかなり読みやすかった記憶があります。
実際の活用法としては、スカラロボットにおける運動学の計算処理を応用して、他の代表的なロボットアーム構造に対応した処理を自作し、卒業研究に使用していました(当時のソースは…どこへ行ったことやら←)。
と、思い出話をしておりましたこのサンプルソース…なんと誰でも無料でダウンロードできちゃうんです!!
ロボット制御に興味があり、プログラムが少しでも読める方は、ぜひ一度ご覧ください。
実際の動きが気になったら、ぜひアカデミックスカラロボット本体をお買い求めください!!