どうも、昨日に引き続きこんにちは!
最近の趣味はミ○四駆、babaです!
今日は昨日からご紹介しているe-Gadegetを動かしてみます!
昨日もご紹介しましたがe-Gadgetはロボット教材です。そしてロボット教材と言えば基本中の基本、ライントレース!
ライントレースとは、床面に描かれた線をセンサで読み取り、その線に沿ってロボットが走行するようにすることです。一般的に床から反射してくる光の量を読み取って線を見つける、という方法が利用されます。
モノに光を当てると、その光は反射します。このとき反射する光の量は、モノが黒っぽい色であれば少なくなり、白っぽければ多くなります。この反射量の違いを利用します。
もし白い床に黒い線を引いた場合、線がない場所であれば、センサはよく反応します。逆に黒い線の上にいた場合、センサの反応は弱くなるのです。
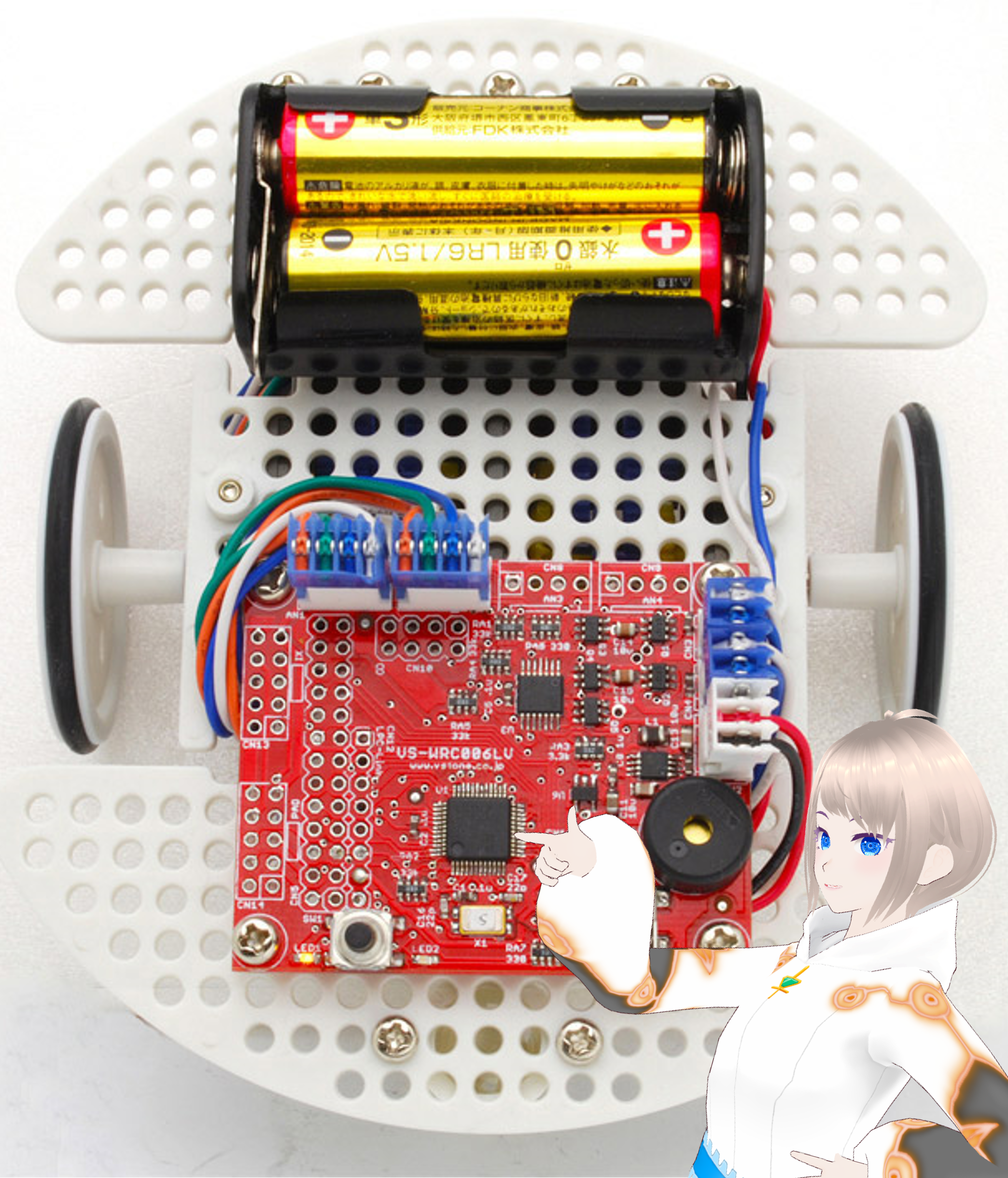
e-Gadgetにはフォトリフレクタというセンサが搭載されています。フォトリフレクタは、LEDと光センサを組み合わせたもので、LEDから光を出し、その光の反射量を読み取るという、まさにライントレースにぴったりのセンサです。
しかもライントレース用のコースもダイセン電子工業さんのページからダウンロードできる!
ということで、レッツトライ!
(動画が動かない場合、フルスクリーンモードをお試しください)
黒い線を見つけたら右に進み、白い床を見つけたら左に進むという簡単なプログラムですが、旋回半径を調整すればちゃんとライントレースします。
今回はセンサが1つなのでかなりガクガクとした動きになりましたが、センサを増やせばもっと滑らかに動かすこともできます。
同じロボットで誰が一番早く一周できるプログラムを作れるか競うというのも面白いかもしれないですね!
ちなみに、ヴイストンの製品にも同じようにライントレースができる「ビュートローバー」という製品もあるので、ご興味がある方はこちらもお試しください!
https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=71_203&products_id=2428
皆さんぜひ挑戦してください!
それではノシ!