はじめまして、morimoriです!
毎週木曜日の技術的お話しのコーナー、今月のテーマは「アカデミックスカラロボット」です。
スカラロボットについては、こちらをごらんください。

今回は、スカラロボットの手先の位置を逆運動学的アプローチで制御してみたいと思います。逆運動学は、手先の位置から各関節角度を求めてロボットを制御する方法です。前回は関節角度から手先位置を求めましたので、これは文字通り逆のアプローチということになります。
スカラロボットは構造が単純ですので、手先の位置から各関節角度を導く式を幾何学的に求めてやります。式は下の画像に示した通りです。シンプルに纏まりましたね。
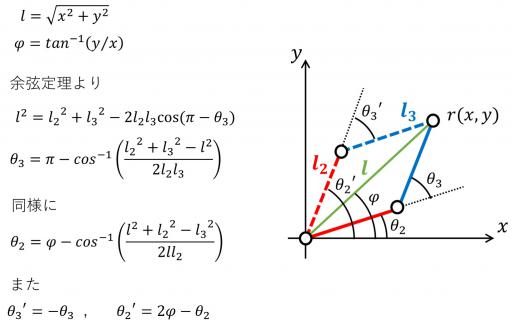
さてここで注目したいのは、あるひとつの手先位置にアームを導くための関節角が2種類あるということです。これは、スカラロボットに冗長性(じょうちょうせい)があることを示しています。
適度に腕を曲げた状態で机に手を置き、腕だけを動かしてみてください。手は動かさずに、腕だけを動かすことができましたか? これが冗長性です。
せっかくなので、この冗長性が良くわかりそうな動画を撮ってみました。動画中のモーション作成には、今回導出した式を活用しています。
自分で求めた式をお手軽に試すことのできるスカラロボットは、制御の学習にピッタリですね。