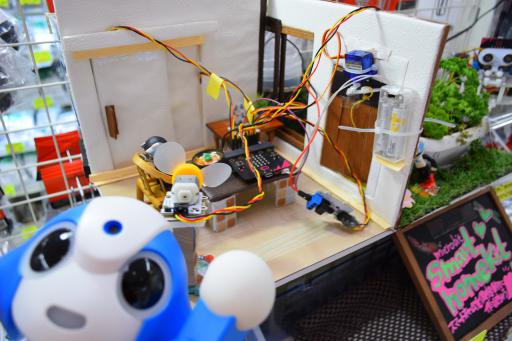
Robovie-nanoの脚って、ちょっと変わった形をしているのにお気づきですか?
実は、平行リンクという機構が使われているのです。今日はこの平行リンクについて見てみましょう!
こんにちは、morimoriです。RobovieMaker2を使ったモーション作成が非常に楽しいです。
ところで、Robovie-nanoの脚を見てみると、膝にサーボモーターがありません!
でも実際にはちゃんと膝を曲げることができています。これは、Robovie-nanoが平行リンクという機構を採用しているからです。
平行リンクとは、4本のリンクを平行四辺形になるように組み合わせたリンクです。向かい合うリンクは、常に平行を維持したまま形を変えます。リンクの頂点のひとつにサーボモーターを取り付けることで、自由に変形させられるのです。
Robovie-nanoでは、人間でいうところの大腿、下腿それぞれが平行リンクになっています。これにより、膝にサーボモーターが無くても、しゃがんだ姿勢をとることができます。
さらに、この平行リンクの組み合わせは歩行においてもメリットがあります。動かしてみると一目瞭然ですが、どのような姿勢にしても、接地面は常に地面と平行になっているのです。
これにより、足首の細かい角度を気にしなくても、地面ときれいに接するように足を着くことができます。
その分自由度は下がってしまっていますが、モーションの作成は簡単になっています。二足歩行ロボット初挑戦の方でも、比較的簡単にモーションを作成できるのがRobovie-nanoの良いところです。