皆さん、どうもこんにちは。
最近なぜか静電気に襲われることが多いbabaです。
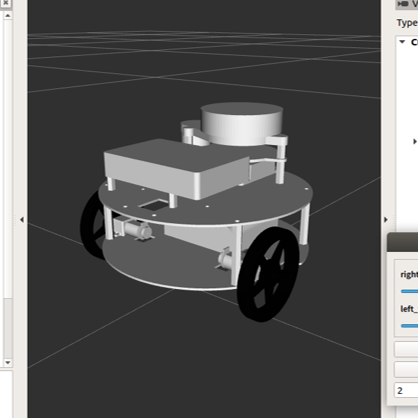
昨日、ゲイン調整によって震えを抑えたビュートバランサー2。
今日は自分の思い通りに移動させることができるようにしてみたいと思います。
先週、junjunさんが倒立振子の原理について解説していましたが、みなさん覚えているでしょうか?
「ロボットの傾きがなくなるように、必要な方向に適度な速度でタイヤを回転させる」というものでした。
もっとざっくり言ってしまうと、「前に傾くとタイヤを前に回し、後ろに傾くとタイヤを後ろに回すことでバランスをとっている」ということですね。
この原理、捉え方を変えると「前に傾ければ前に進み、後ろに傾ければ後ろに進む」ということになります。
つまり、「倒れない程度に進みたい方向に傾けた状態を保つ」という制御ができれば、自分の思った通りにビュートバランサー2を動かすことができるのです!
ちなみに、最近人気のパーソナルモビリティ(セ○ウェイとか)もこの原理を利用しています。
というわけで、ビュートバランサー2を自由に動かせるようにするわけですが、ビュートバランサー2、実はプログラムを書かなくても、弊社の無線コントローラ VS-C3を接続することで、無線操縦ができるようになっているんです!
もちろん、自分でプログラムを組んで遊ぶこともできます。
ご興味のある方はぜひお試しください!
(動画が動かない場合、フルスクリーンモードをお試しください)
——————————————————————-
弊社技術スタッフが本製品を使って色々チャレンジしております。
よろしければ参考に下記ご覧くださいませ。
※こちらの内容に関する質問等はお受けしておりません。
——————————————————————-